|
In this test, 10 pounds were added to TrotBot with 3 versions of feet:
1. feet with heel and toe linkages 2. feet with only heel linkage 3. feet without heels or toes. As can be seen in the video, TrotBots without heels and toes should be built in a 12 leg version to handle heavy loads. Also, we added 10 pounds to a toe-less TrotBot that used LEGO's plastic axles, but its bumpier gait required more torque than the plastic axles could handle. Those axles twisted so much that TrotBot could barely walk, so we replaced them with steel axles before filming this test. We should have included a clip of the plastic axle version to better show how heavy walkers with bumpy gaits may need LEGO's plastic axles replaced with steel axles to handle the torque. An alternative to adding heel/toe linkages to TrotBot is to build it in a 12-leg version, which results in a similar increase in foot-contact with the ground. However, it's a wider build, so the longer crank/axle system will twist more if LEGO's plastic axles are used. For this reason we usually replace at least the inner leg's plastic axles with steel axles when building 12-legged walkers.
2 Comments
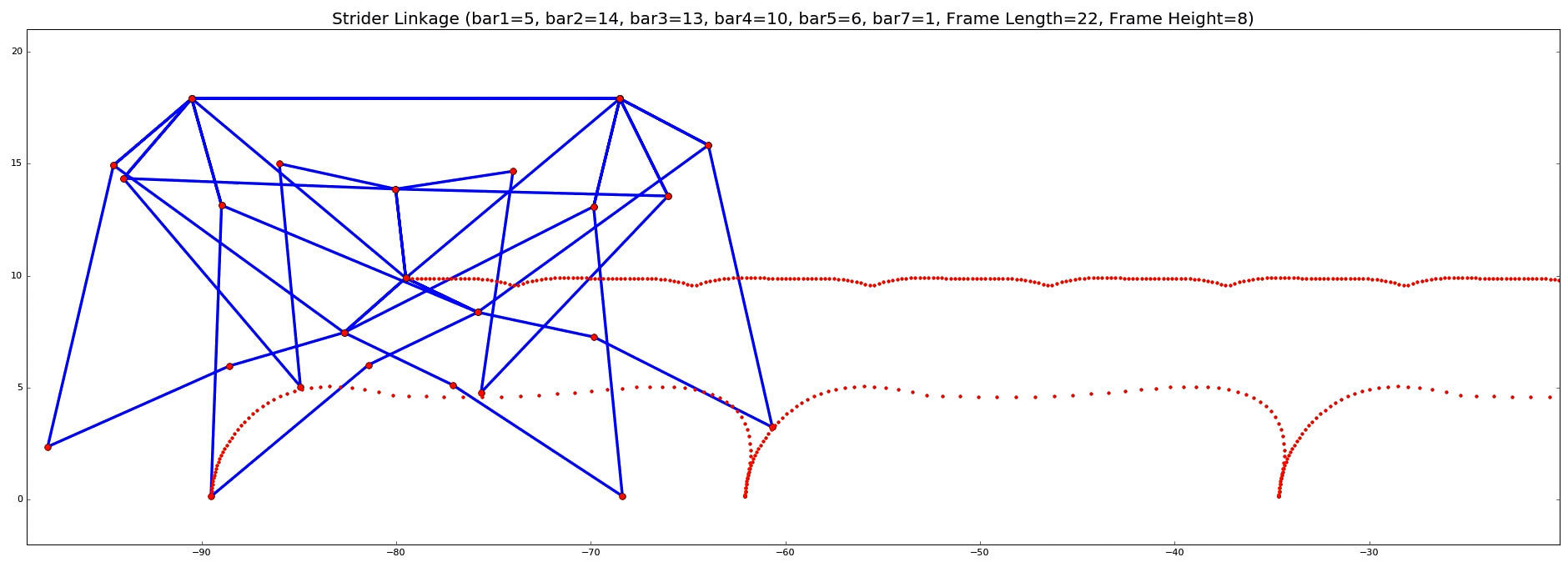
I've been thinking about creating an EV3 Strider Ver 2, but to handle the increased weight and width Strider needs to be improved in a few ways, like by increasing the amount of foot-contact it has with the ground.
One way to increase foot-contact is to add four more legs. To check how this would smooth the gait I simulated one side of a 12-legged Strider (Ver 2), and if you watch the video below you'll see Strider bounce whenever the feet touching the ground switch. This bouncing shouldn't be much of a problem at LEGO scale, but it would be at large scale. While a scaled-up Strider's linkage could be optimized for a smoother gait, it can also be smoothed by adding feet that are shaped to offset the gait's bumpiness. As an example, in the second half of the video I added small triangular feet to the front legs, which act like heels and toes. These feet reduce the gait's bumpiness by about 1/3rd. However, the toes are more likely to catch on obstacles, which can cause the linkage to lock and gears to grind. UPDATE: in 2018 we re-optimized Strider's linkage again, and published a half dozen new variations who's gaits can be smoothed by adding toes like those added to Strider Ver 3 below: 
Strider Ver 3 with a Rolling Heel-Toe Gait
Strider Ver 3 without Toes - the Red Center Line Shows the Bump in the Gait at Foot Transitions
Below is Strider Ver 3 in a LEGO prototype with the above simulated toes of length 2:
And here's the same Strider linkage with 8 legs plus longer toes of length 3. Longer toes were used to reduce how far the robot falls at foot transitions when built with only 8 legs: Curved feet Feet with curved bottoms that are shaped to offset the bumpiness of a particular linkage should be even more effective at smoothing gaits - at least when walking on smooth ground. Below is a great example:
And here's another example by Eko Widiatmoko:
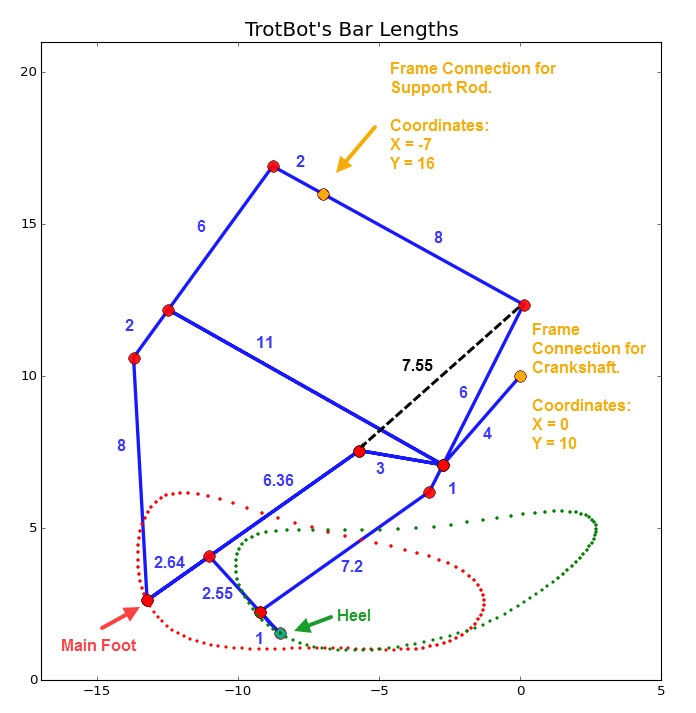
The first result of that effort was TrotBot's heel linkage. As you can see in the diagram below, TrotBot's heel strikes before the main foot, taking the weight while pushing backward to continue driving the robot forward. The resulting smoother gait reduces both torque and power requirements (for an analogy of why bumpy gaits require more power, think how much harder it is to do lunges than it is to simply walk).
Another benefit of TrotBot's heel is it steps higher on the backside of the foot-path, allowing TrotBot's rear legs to step about as high as the front legs to avoid getting stuck astride obstacles, as can be seen in this heel-path simulation: 
Without its heel, TrotBot's rear legs probably would have gotten stuck on some of these 2x4s:
We've also played around with a few ideas for active toes that push down on the ground as the foot begins to lift: 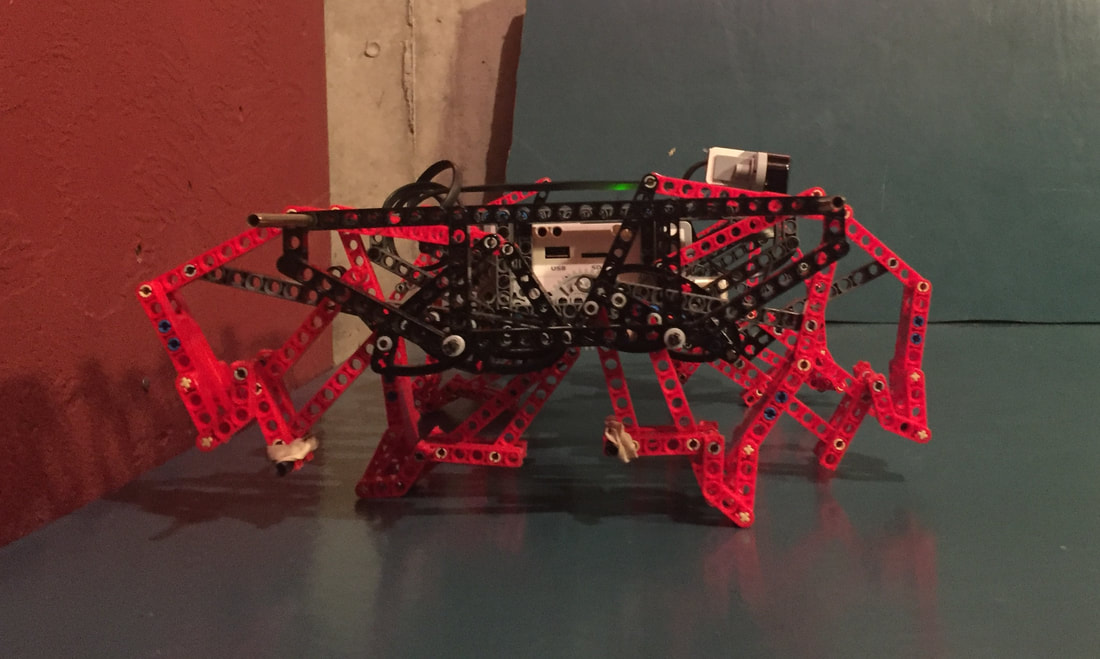
Mindstorms TrotBot with Active Toes
Using shaped feet to smooth gaits is explored next in Feet Part 2, and the impact of TrotBot's active toes are explored in Feet Part 3.
|
Categories
All
Archives
February 2023
|

 RSS Feed
RSS Feed