DIY Walkers from LEGO-scale to SUV-scale
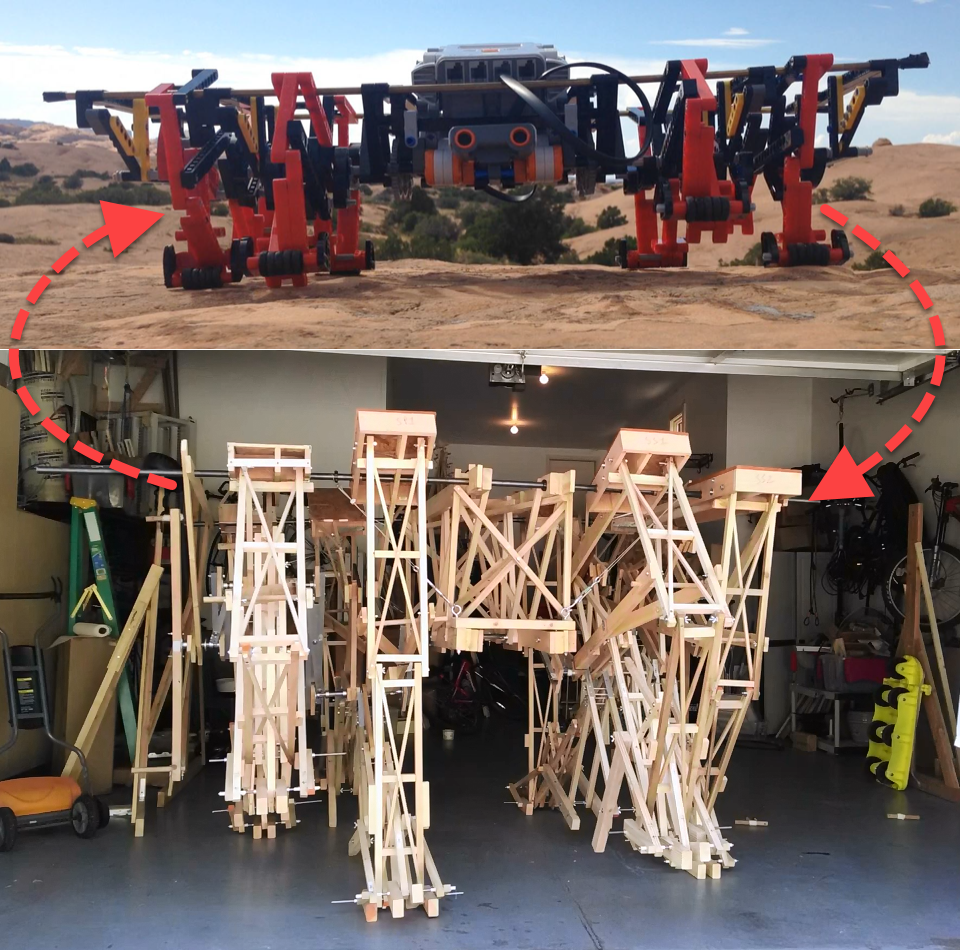
Although the principles for building mechanical walkers are the same at both scales, the benefit of scaling up is how it magnifies issues with designs, providing feedback for fine tuning that is not available at LEGO-scale.
TrotBot

Wade, Ben and Team TrotBot in 2015
|
Welcome to DIYwalkers! We started by building Joe Klann's amazingly robust Mechanical Spider, Theo Jansen's majestic Strandbeest and our own TrotBot and Strider mechanisms in LEGO. Then a team of us from our school attempted to scale up TrotBot in our garage, which resulted in a much deeper "learning experience". Hopefully our tools and lessons-learned can help you with designing and building mechanical walkers with greater functionality. Good luck building and thanks for your interest! Ben and Wade |
Navigating DIYwalkers
Since launching in 2016, DIYwalkers has grown organically as we conducted more experiments and added more builds. Here's an overview to help you with navigating the site.
Navigating DIYwalkers
Since launching in 2016, DIYwalkers has grown organically as we conducted more experiments and added more builds. Here's an overview to help you with navigating the site.
- Walker ABCs is a high-level overview of how mechanical walkers work, or don't.
- Our Blog posts go into more detail on specific problems/solutions, experiments, and ideas for taking walkers to the next level.
- Build Instructions provides linkage plans and LEGO Technic building instructions for a variety of walkers.
- Customize provides interactive simulators to modify walking mechanisms for building in LEGO and other robot building mediums, or for 3D printing.
- Linkage Simulation breaks down how to simulate linkages, and provides sample code in Python and Scratch.
|
|
Strider Ver 3
© Ben Vagle, Wade Vagle and DIYwalkers.com, 2016-2024. Unauthorized use and/or duplication of this material without express and written permission from this site’s authors and/or owner is strictly prohibited. Excerpts and links may be used, provided that full and clear credit is given to DIYwalkers.com with appropriate and specific direction to the original content. Contact: Wade@TeamTrotBot.com