Klann's Linkage Dimensions
Thank you for your amazing creation, Joe Klann!
|
Below are the linkage dimensions from Joe Klann's patent along with a LEGO approximation. Also, you can find a Klann linkage optimizer and other configurations of Klann here. |
|
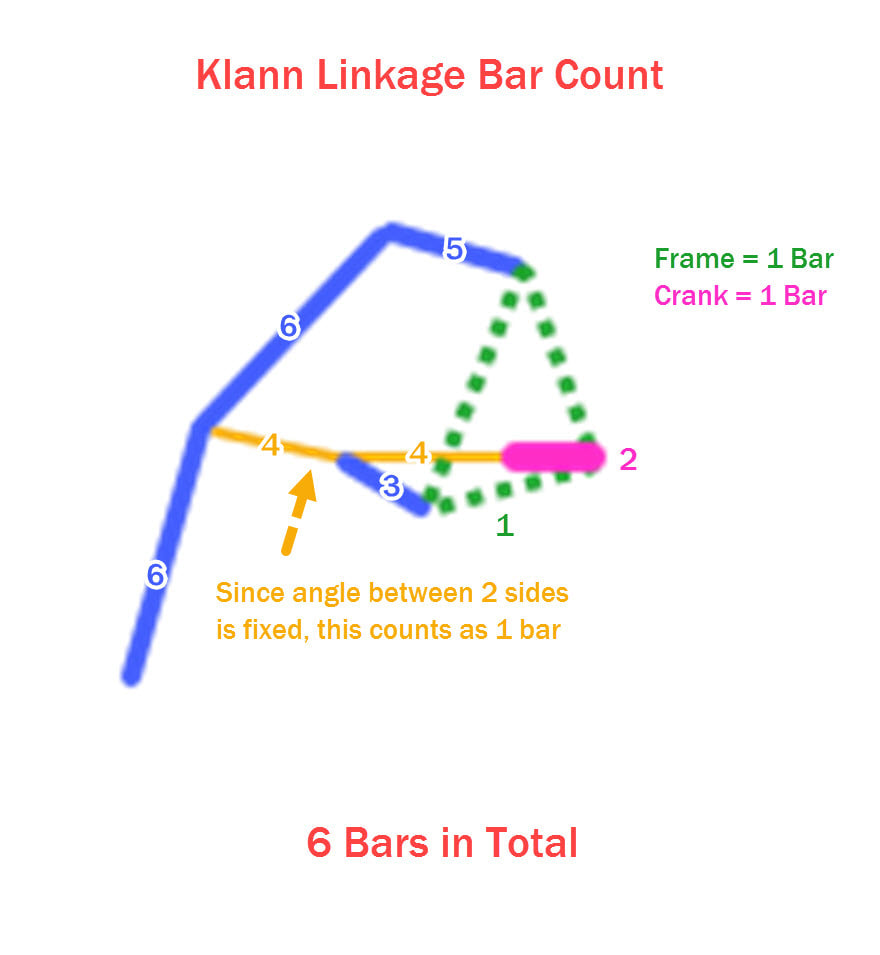
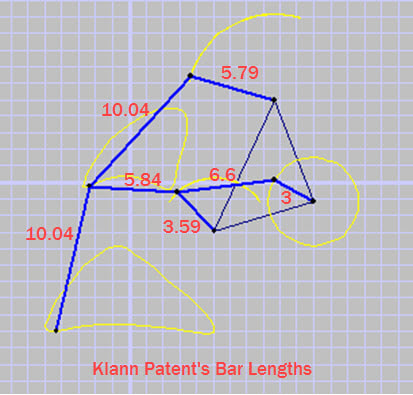
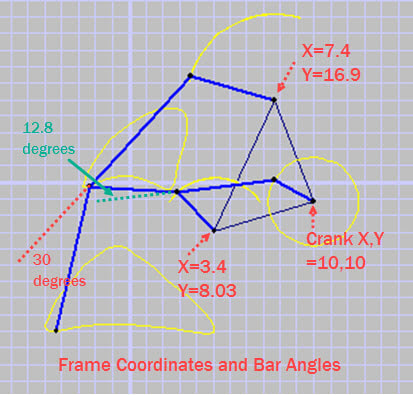
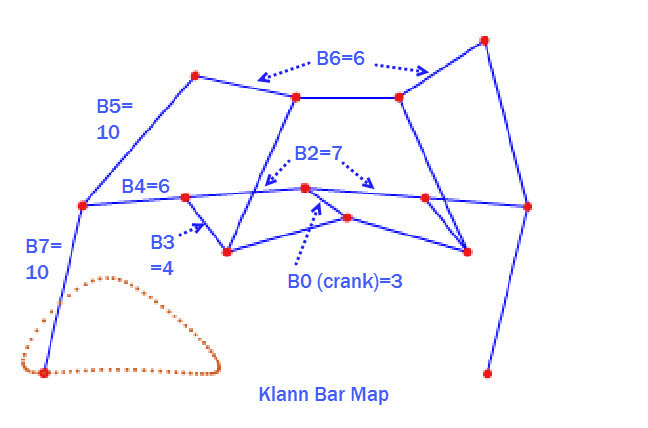
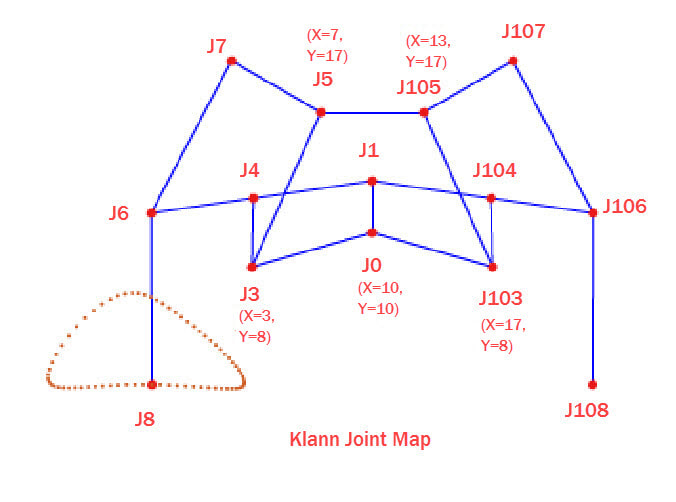
1. Patent's standard version, with Klann's linkage measurements scaled so that the crank's length equals 3:
|
|
2. Standard Version - LEGO Approximation used for Klann Ver 2:
2. Standard Version - LEGO Approximation used for Klann Ver 2:
Note: the angle of the knee's bend (B5 to B7) is 29 degrees
|
|

Klann's Standard Bar Lengths, Patent vs LEGO
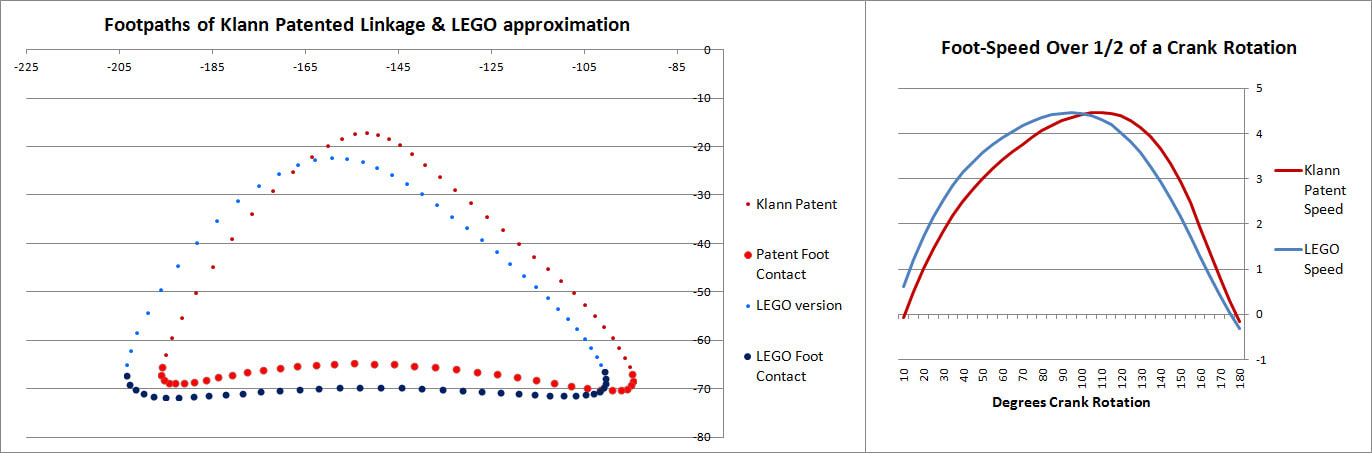
Below are the foot-paths, and the speed of the feet when in contact with the ground. Klann's foot-speed varies a lot, and the feet essentially come to a stop at each corner of the foot-path. Here's one idea to reduce the speed variability.
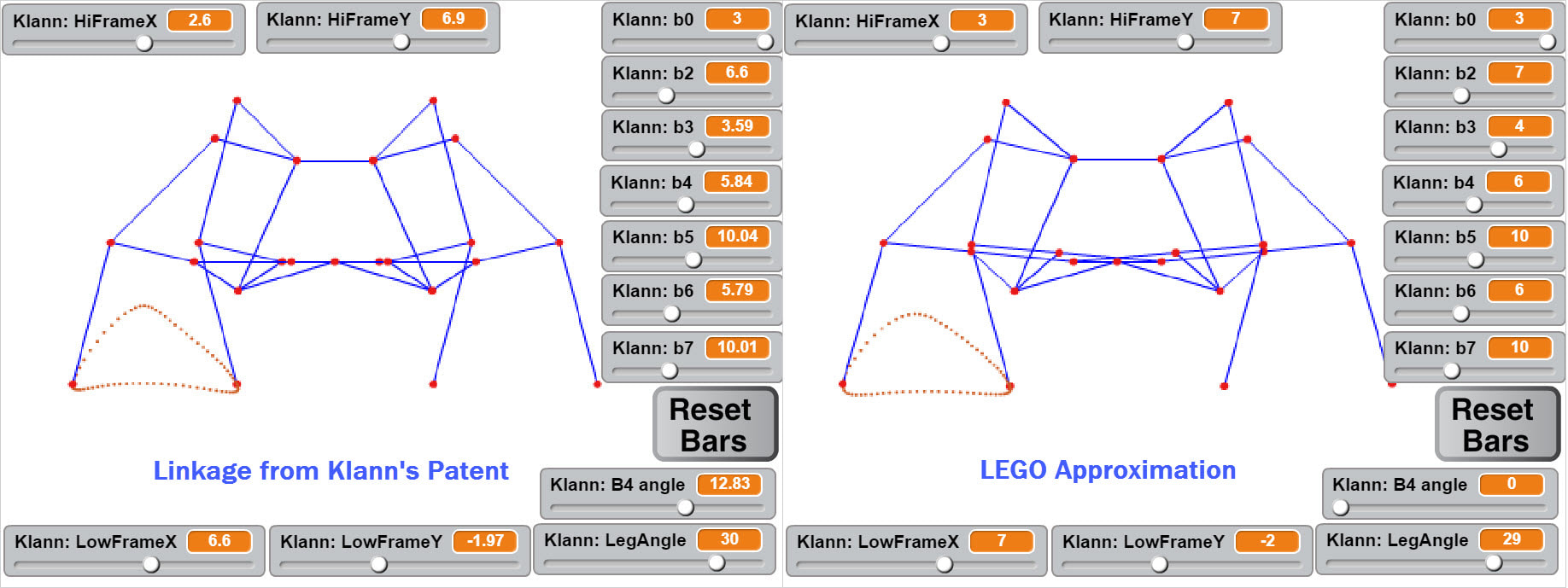
Linkage from Klann's Patent and a LEGO Approximation
Simulation of our LEGO approximation of Klann's linkage, which is built below in LEGO