TrotBot's Leg Mechanism Simplified
TrotBot's Leg Mechanism for Mindstorms TrotBots, Hexapod and Quadruped TrotBot, and TrotBot Ver 3

A couple of things I learned from teaching my walking robot class are that TrotBot's build instructions are too long, and also that sometimes the students built legs that weren't straight, causing the linkage to bind and jam. Hopefully these leg-only instructions will help!
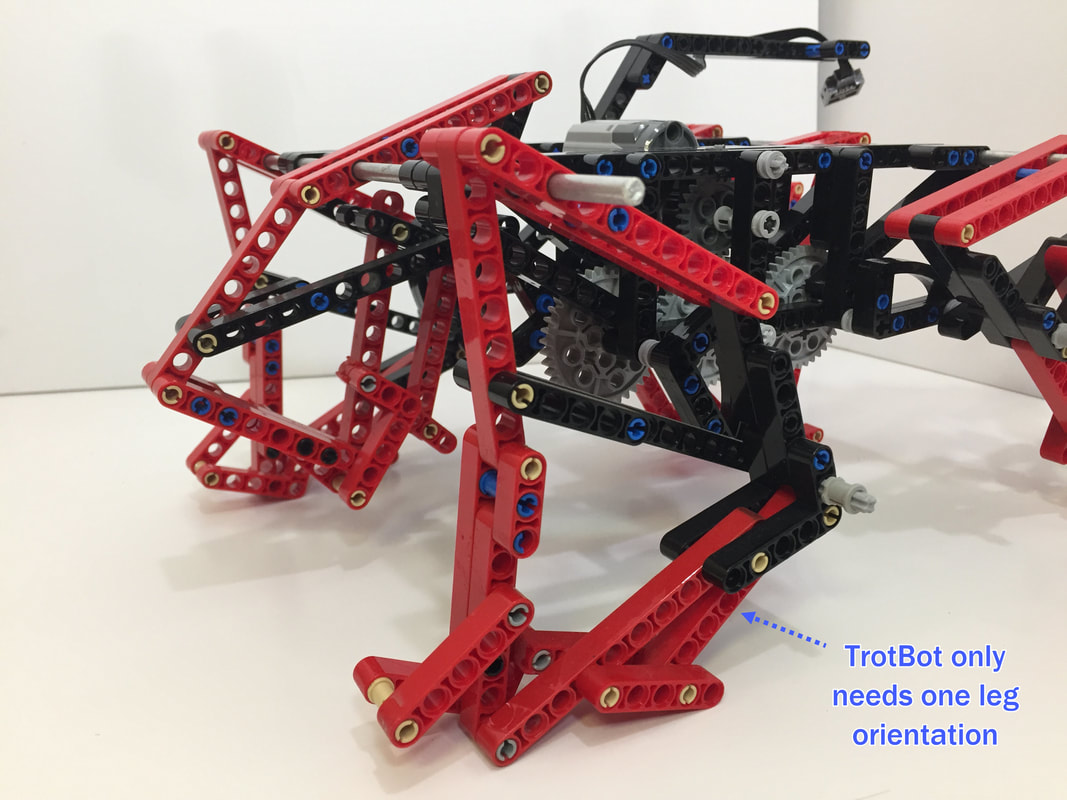
Building only one leg orientation shortens the leg's instructions by half, and makes the final assembly of the robot less confusing
TrotBot with legs timed for a Tripod Gait by rotating the right crank 80 degrees counter-clockwise relative to the left crank.
Both Quadruped and Hexapod TrotBot use this tripod gait.
Main Points
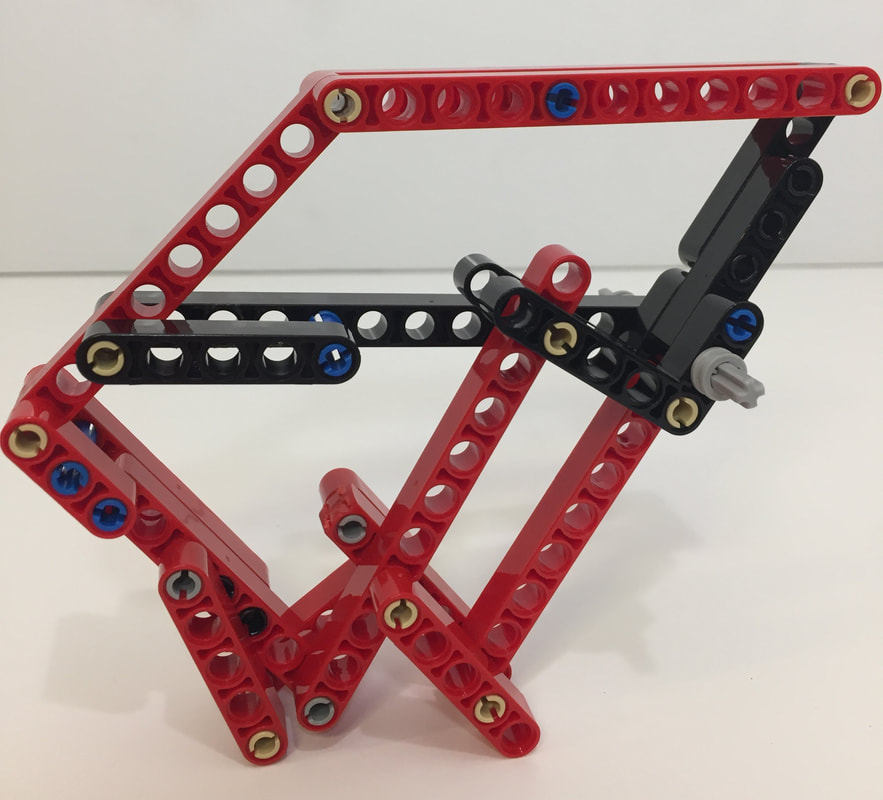
1. You only need to build one type of leg, and make 6 or 8 of them. TrotBot doesn't need both "left-facing" and "right-facing" legs to walk well, and either orientation will work fine. Instead, you can simply flip a left-facing leg around to face right, so that TrotBot's "knees" are always facing away from the center of the robot.
These instructions cover building the above "left-facing" leg, which works for all 6 legs of Hexapod TrotBot, and for all 8 legs of TrotBot Ver 3 and Mindstorms TrotBot (Versions 2 and 3)
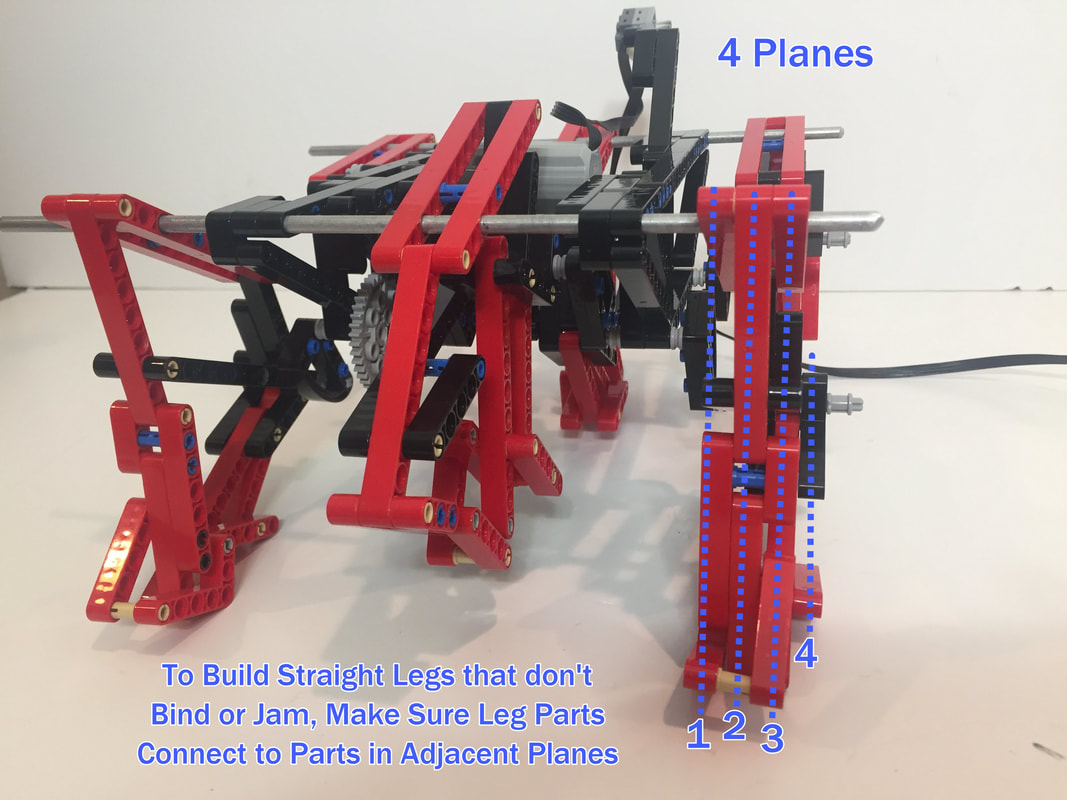
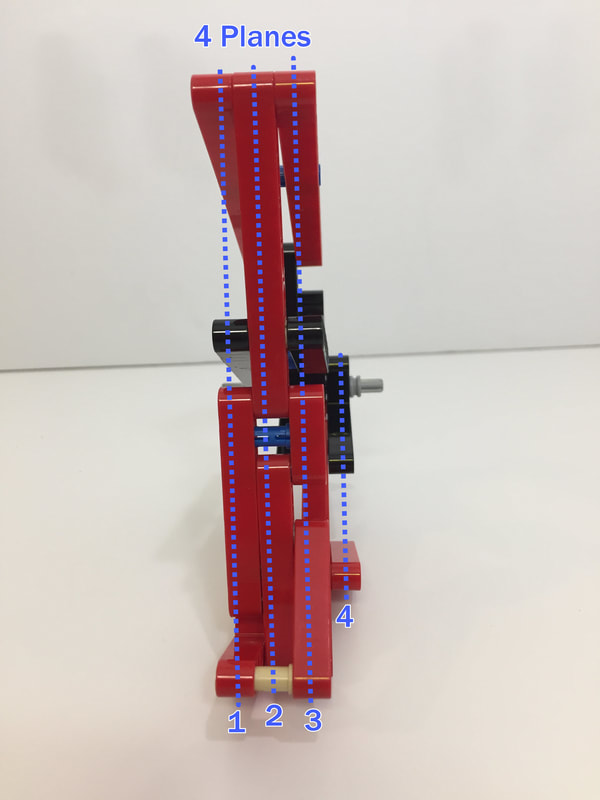
2. If leg parts are connected to other parts in the wrong plane, then the leg will be twisted and the linkage will bind or jam. To avoid this, these instructions show how to build the leg in stages, one plane at a time:
Part List for One Leg:
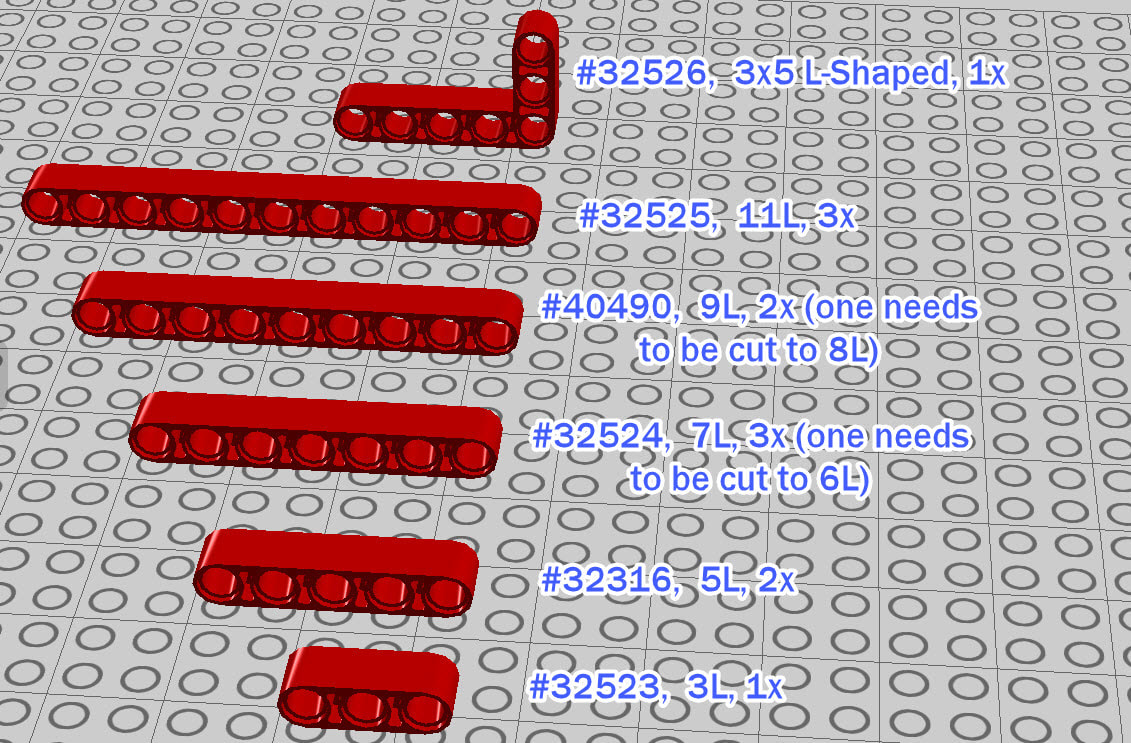

We purchased the LEGO parts on Bricklink.com. If you've never used Bricklink, an easy way to browse for parts is by going to a larger store. Here's a list of stores in the USA.
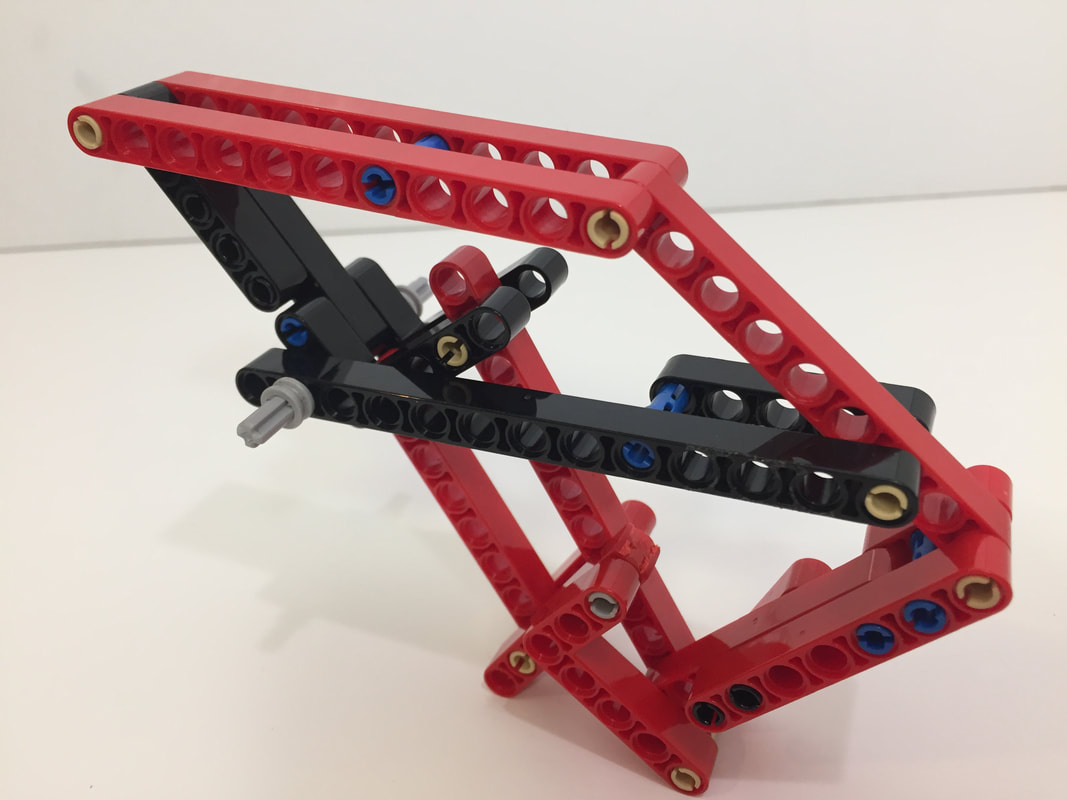
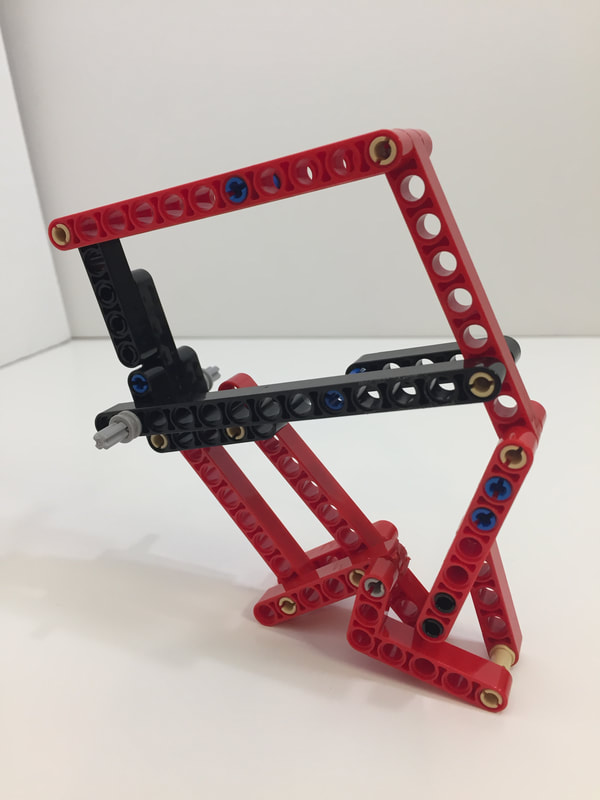
Here are a few more views of how this leg should look when finished:
Here are a few more views of how this leg should look when finished:
TrotBot's Leg Mechanism with Retractable Toes
|

|
Adding toes smooths TrotBot's gait, allowing 8-legged TrotBots to carry the heavy EV3 brick, or for it to be built in a 6-legged version. Without toes, it has a gait that is too bumpy for the Mindstorms' Brick - bouncing the heavy Brick up and down requires too much torque - but toeless 8-legged TrotBots work well with the lighter Power Functions' battery box and motors like used in TrotBot Ver 1, or in this video of TrotBot vs the Couch where the toes were removed before filming:
Build Instructions
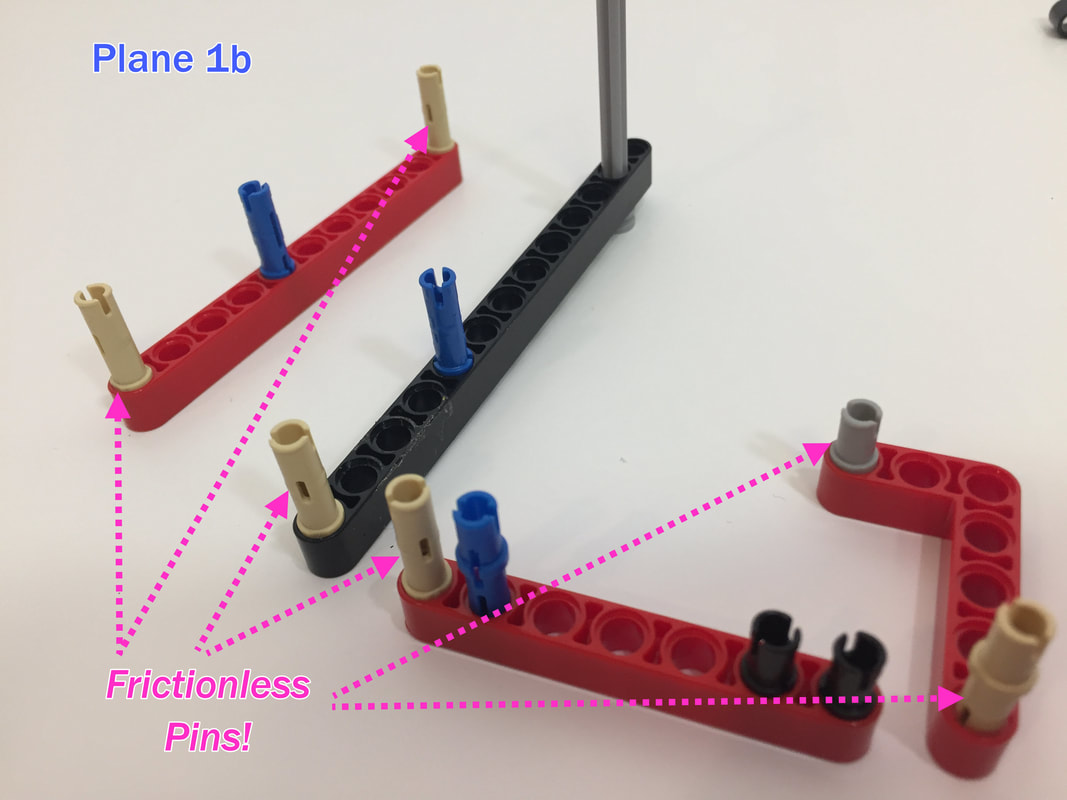
These instructions build the leg one plane at a time, starting with Plane 1:
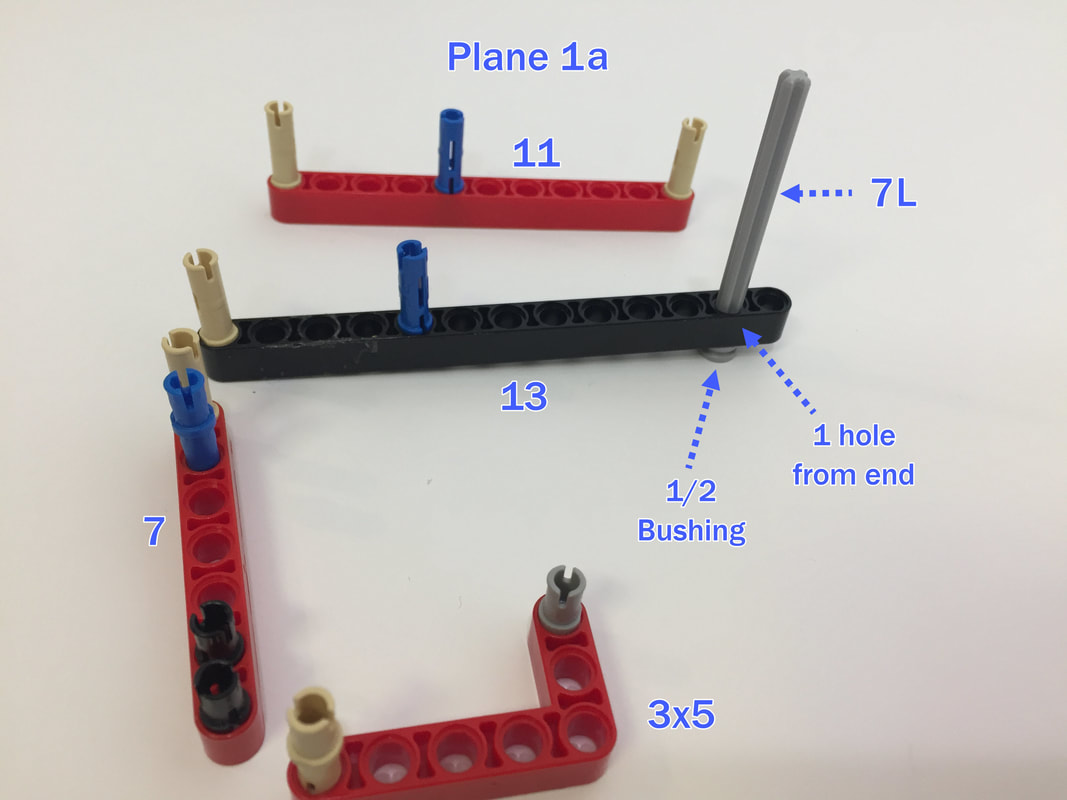
|
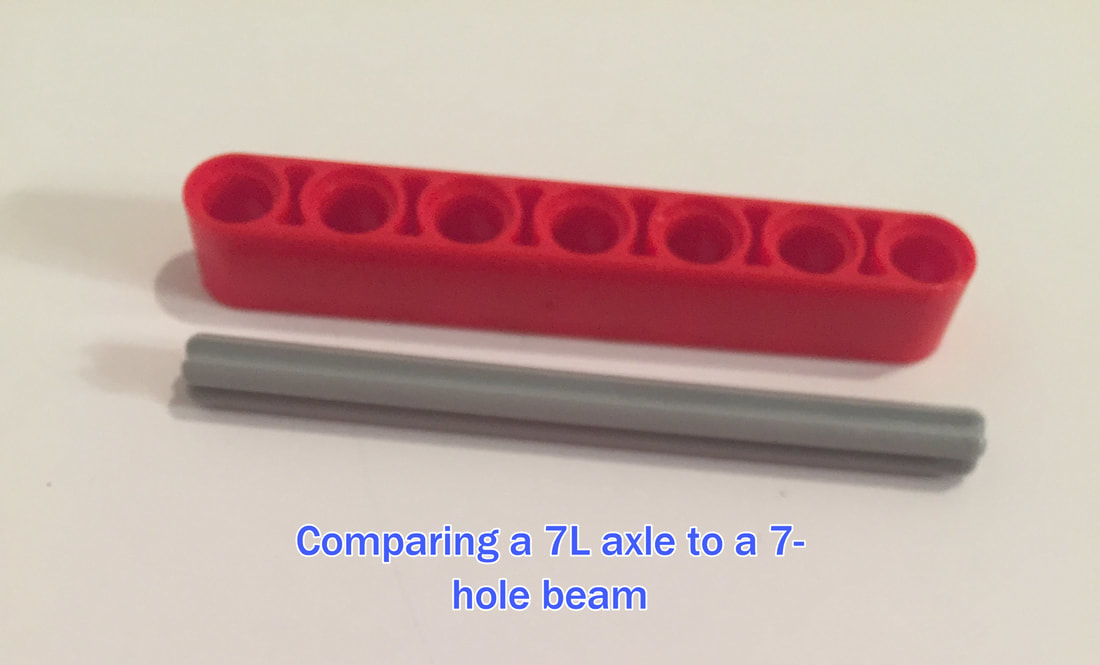
If you aren't sure which of your axles is a 7L axle, as pictured above, then simply compare it to a beam with 7 holes, as shown to the right. |
|
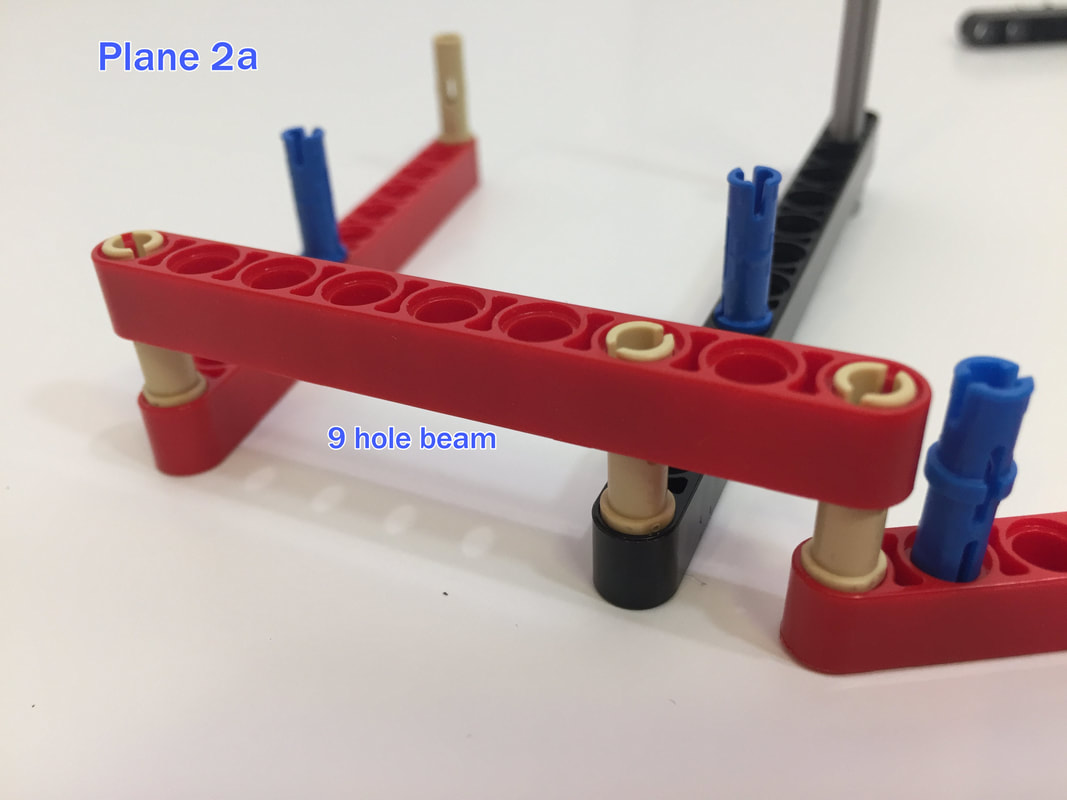
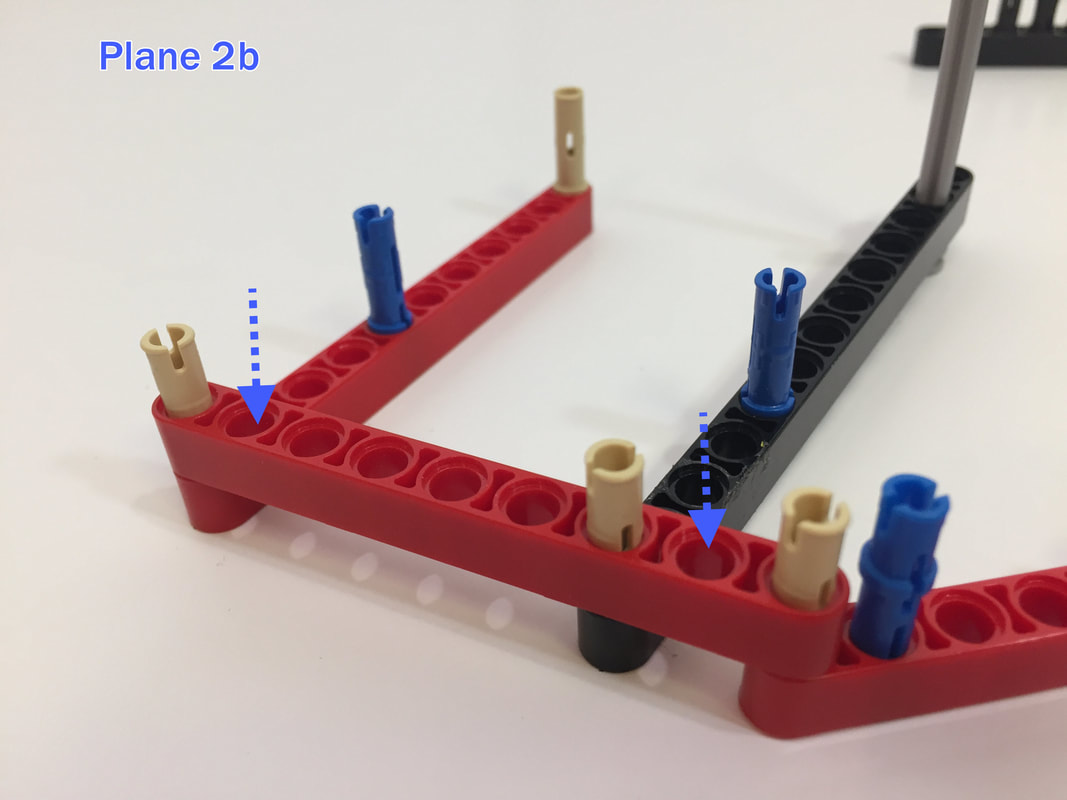
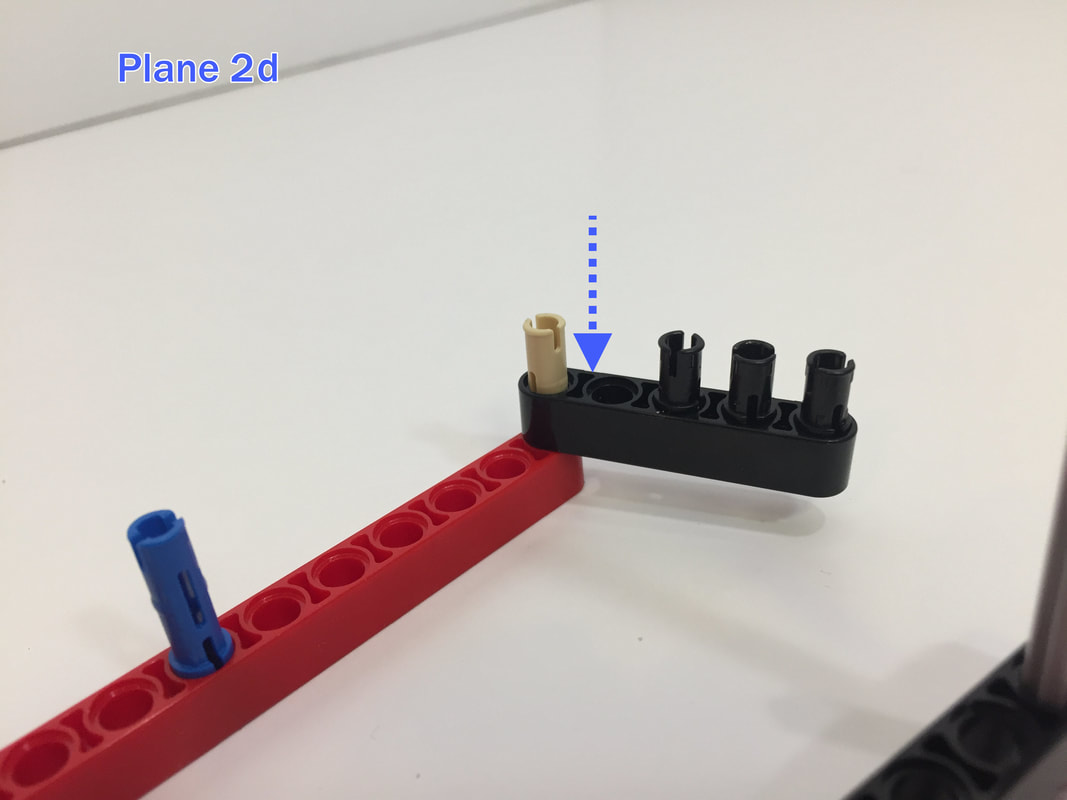
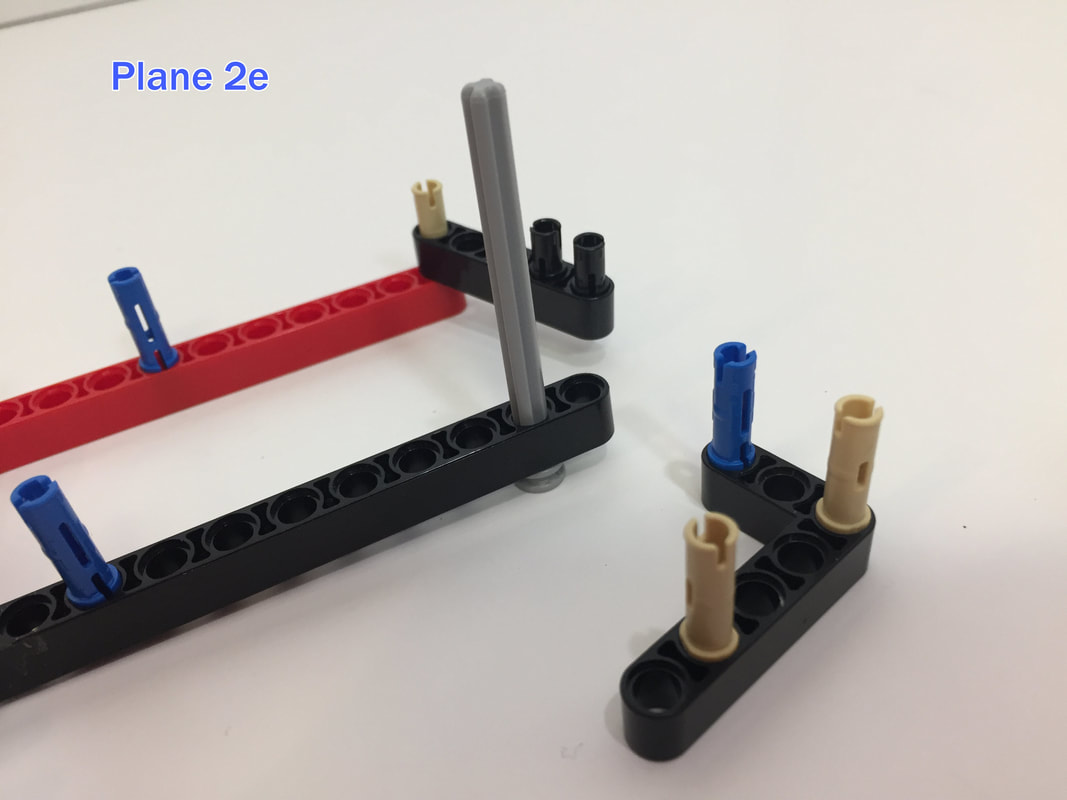
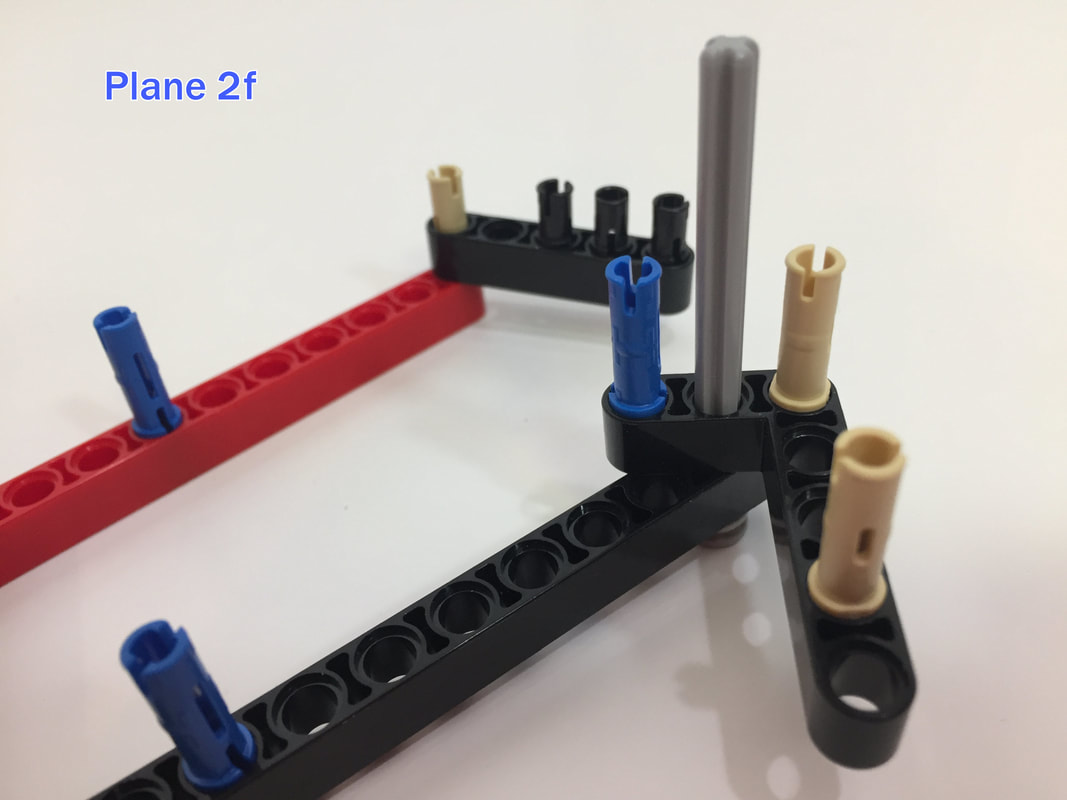
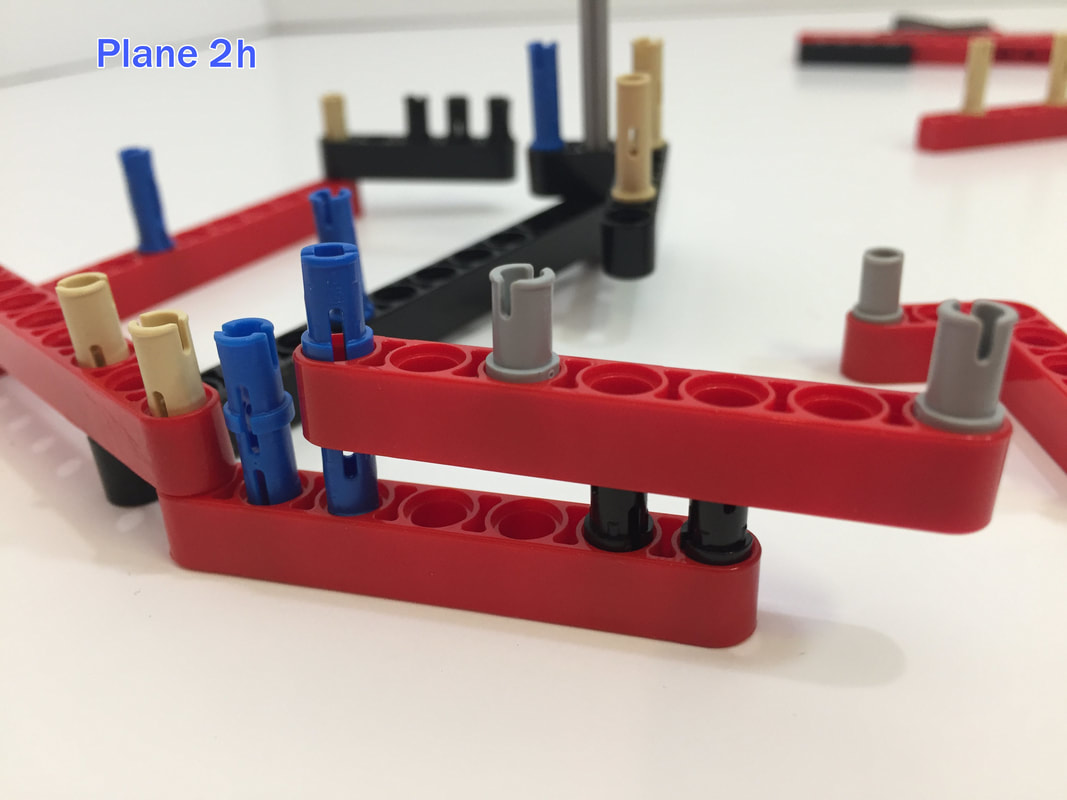
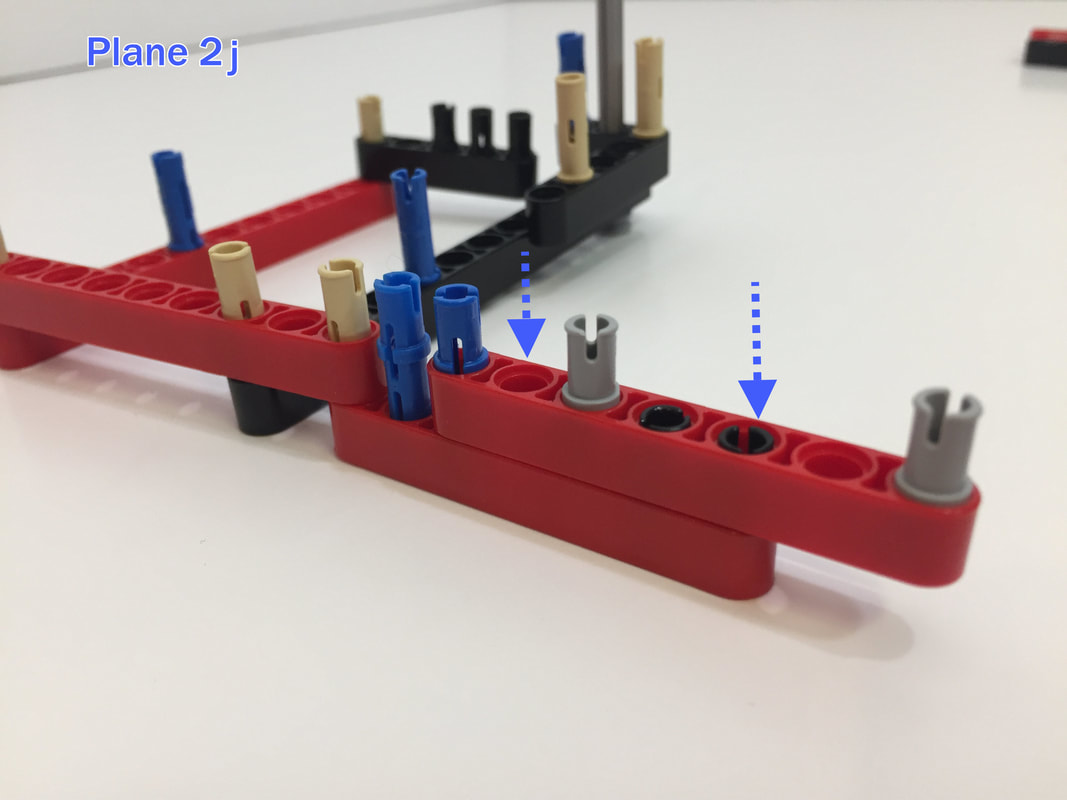
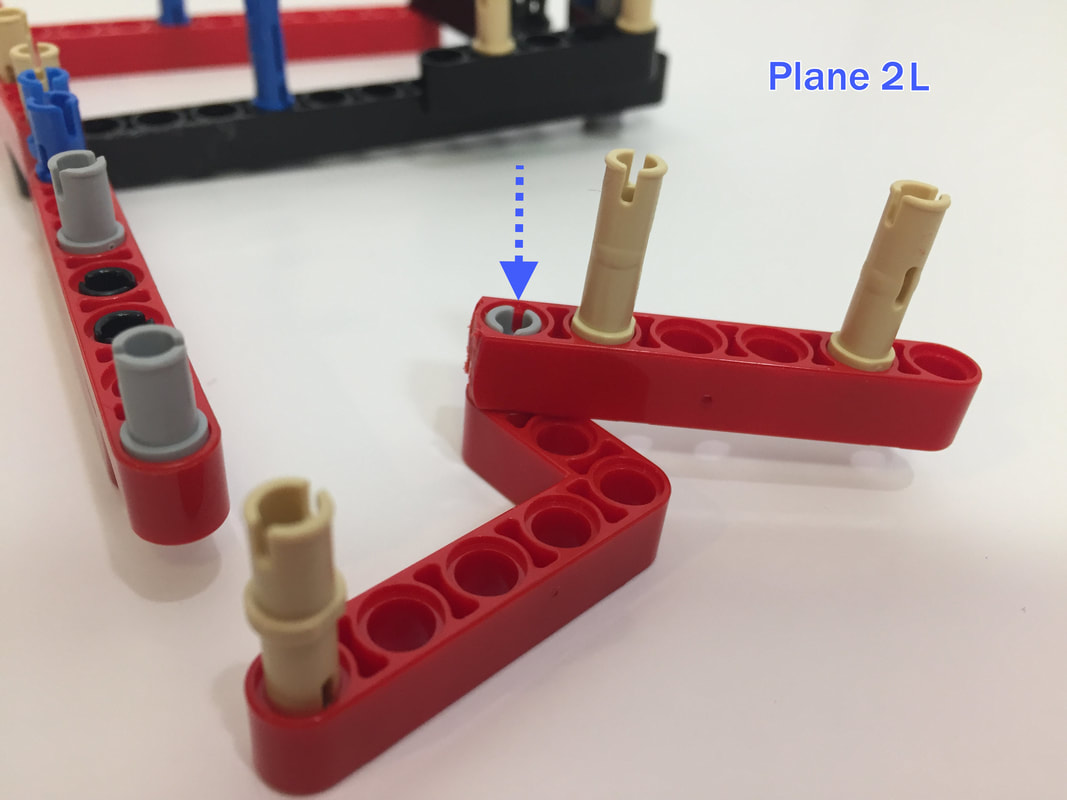
Next, add Plane 2:

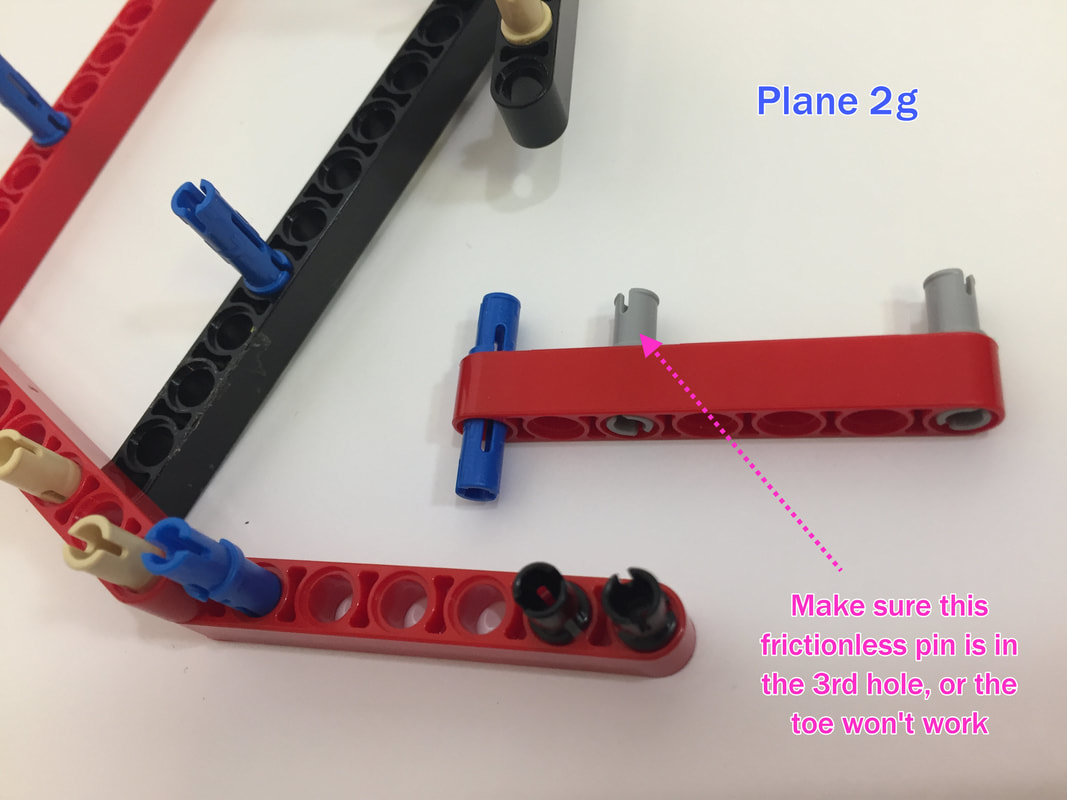
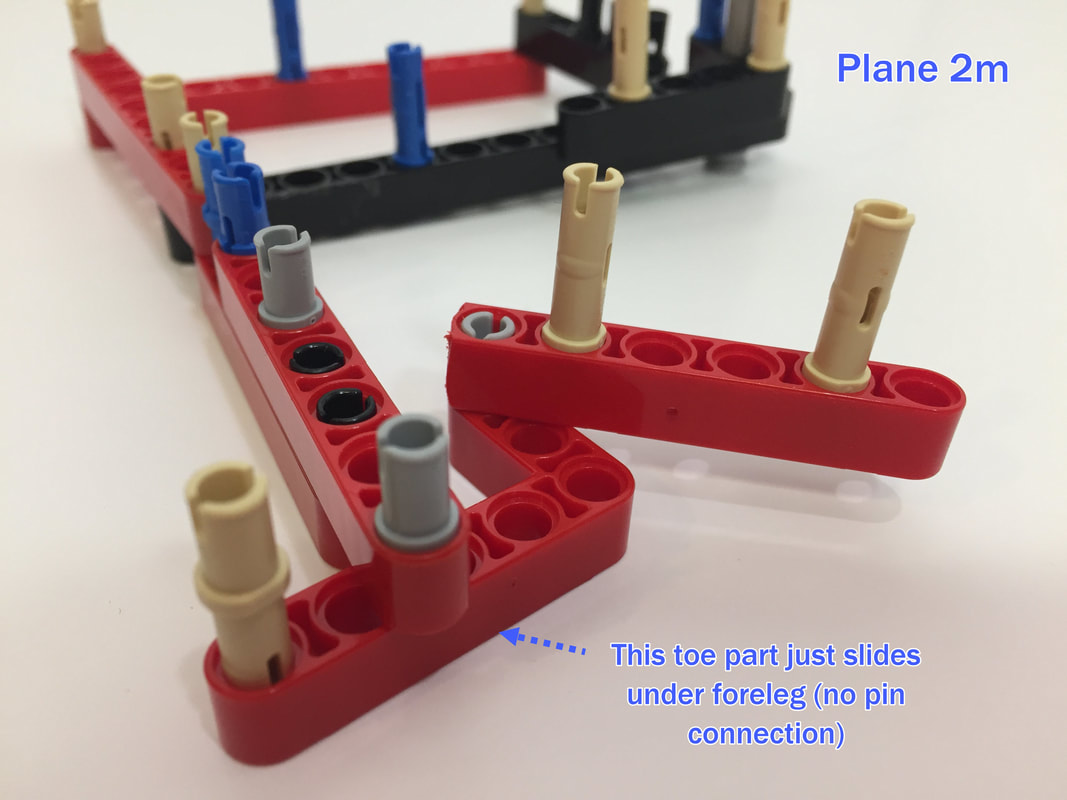
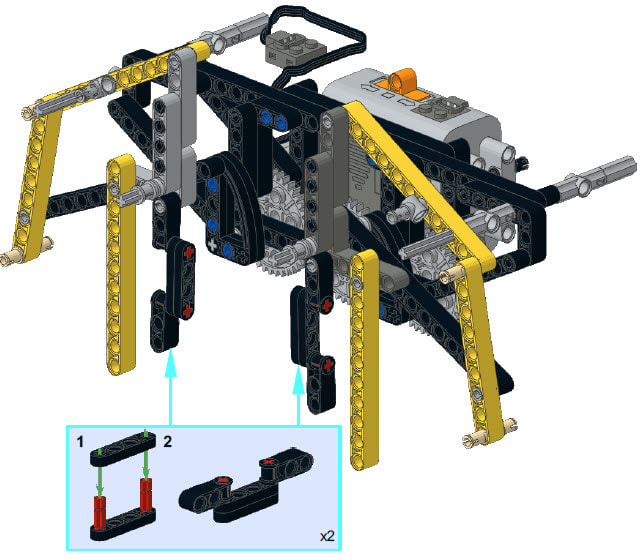
Below adds retractable toes, which are recommended for Hexapod and Mindstorms TrotBots to smooth the gait. However, 8-legged, battery box TrotBots are lighter and have enough foot-contact with the ground to walk without toes - like TrotBot Ver 1.
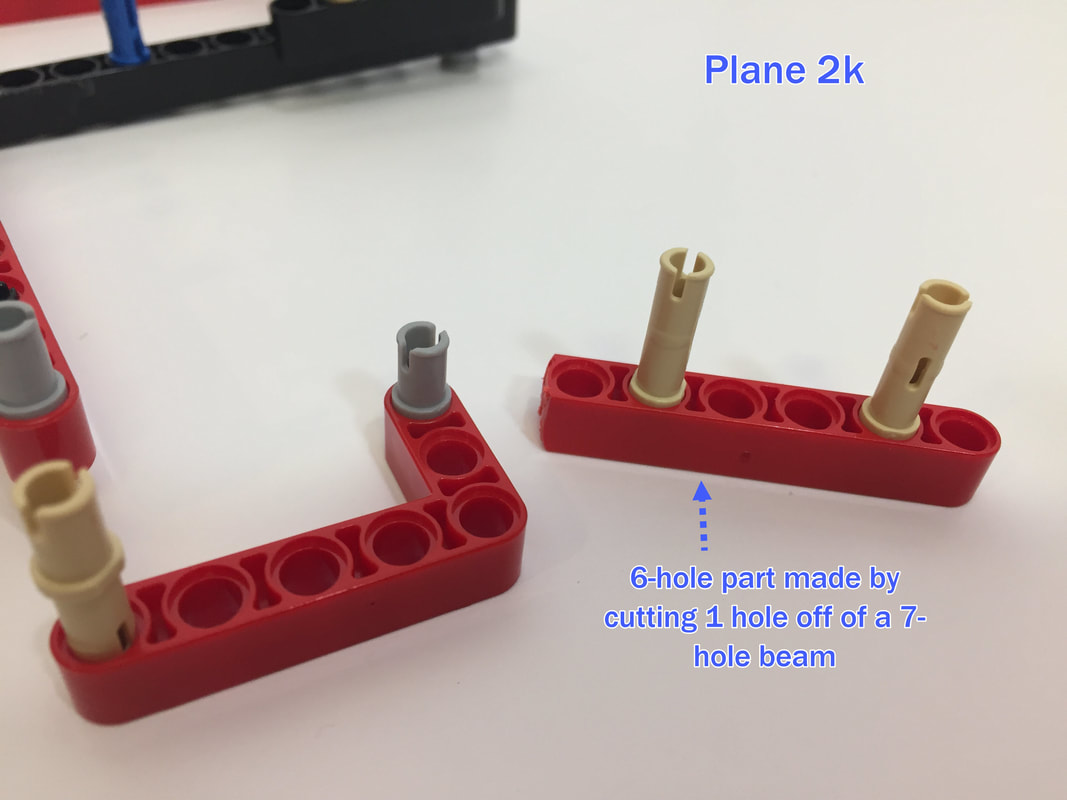
The hobby saw I used to cut this part is shown below
If you don't want to cut one hole off of a 7-hole beam to make a 6-hole beam, then below is another option.
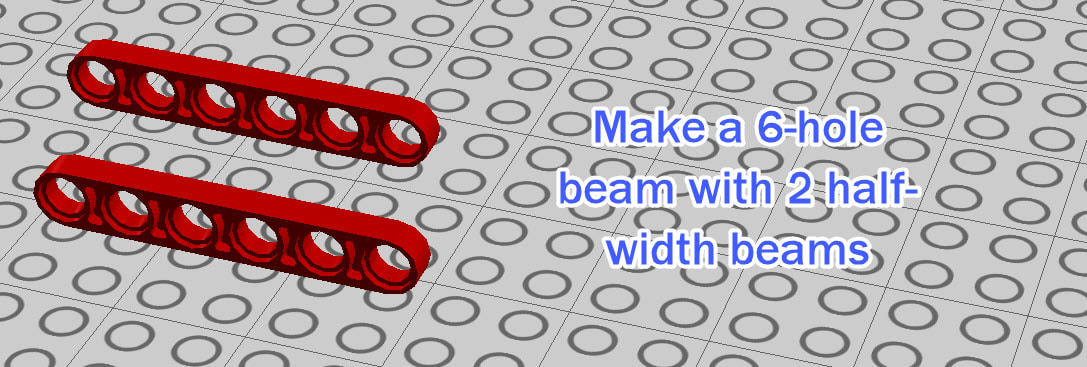
Another option for making a 6-hole beam
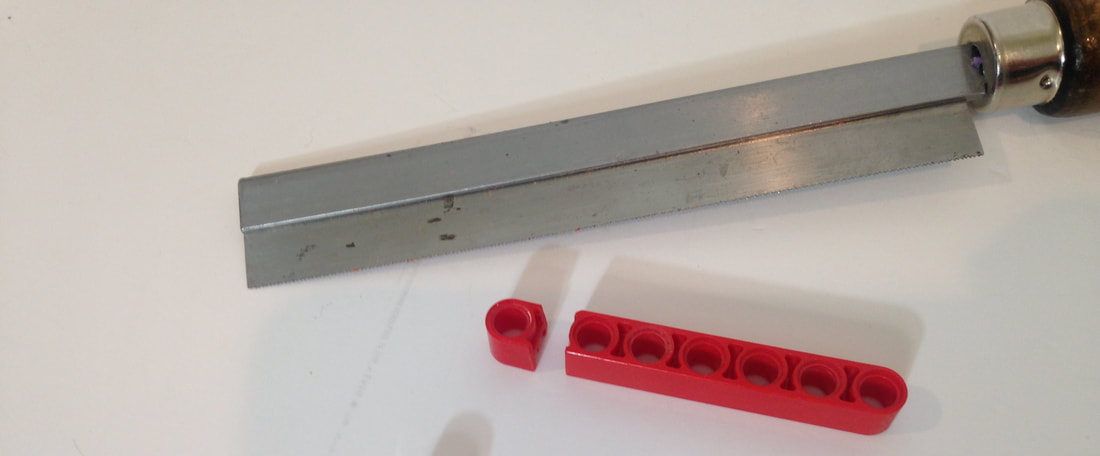
Performing a bit of LEGO "surgery" with a hobby saw to make a 6-hole beam. I also lightly filed the cut end to remove plastic debris.
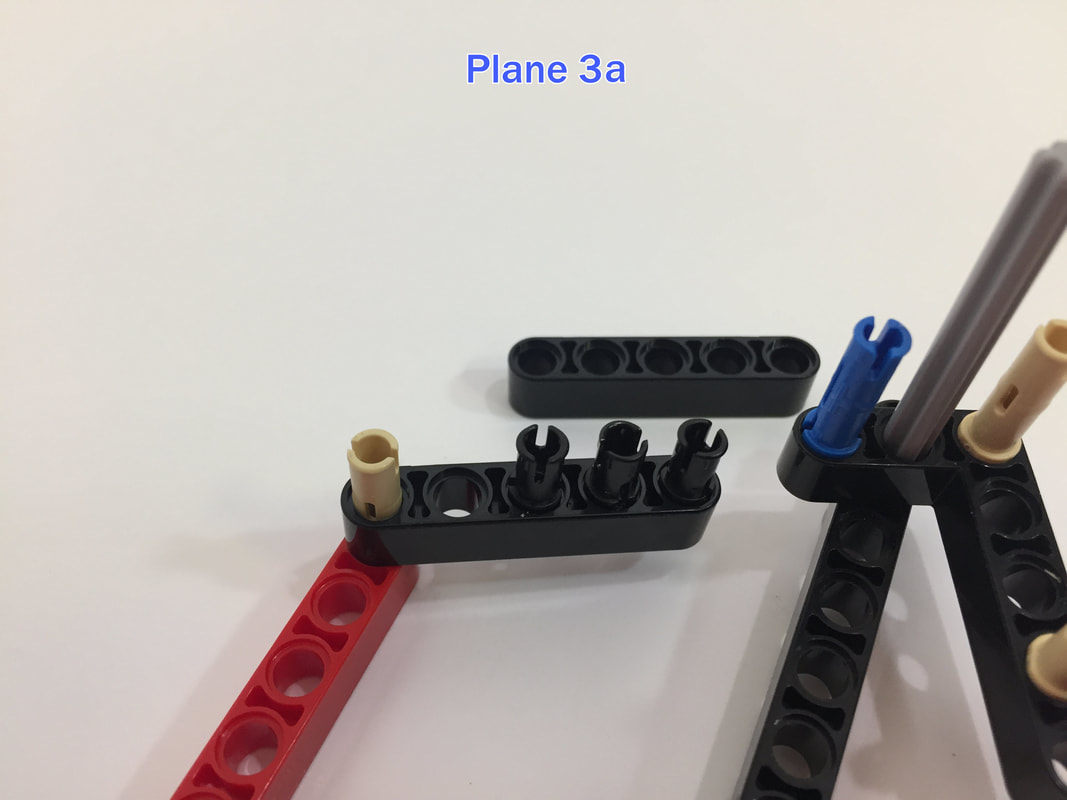
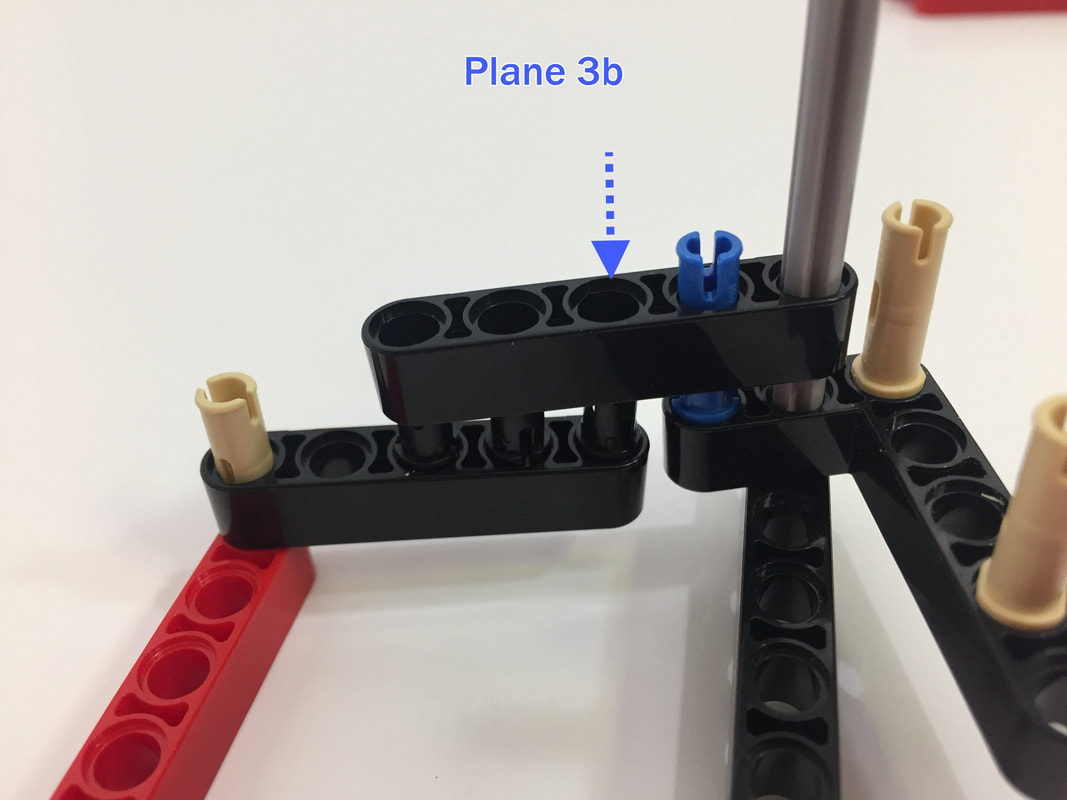
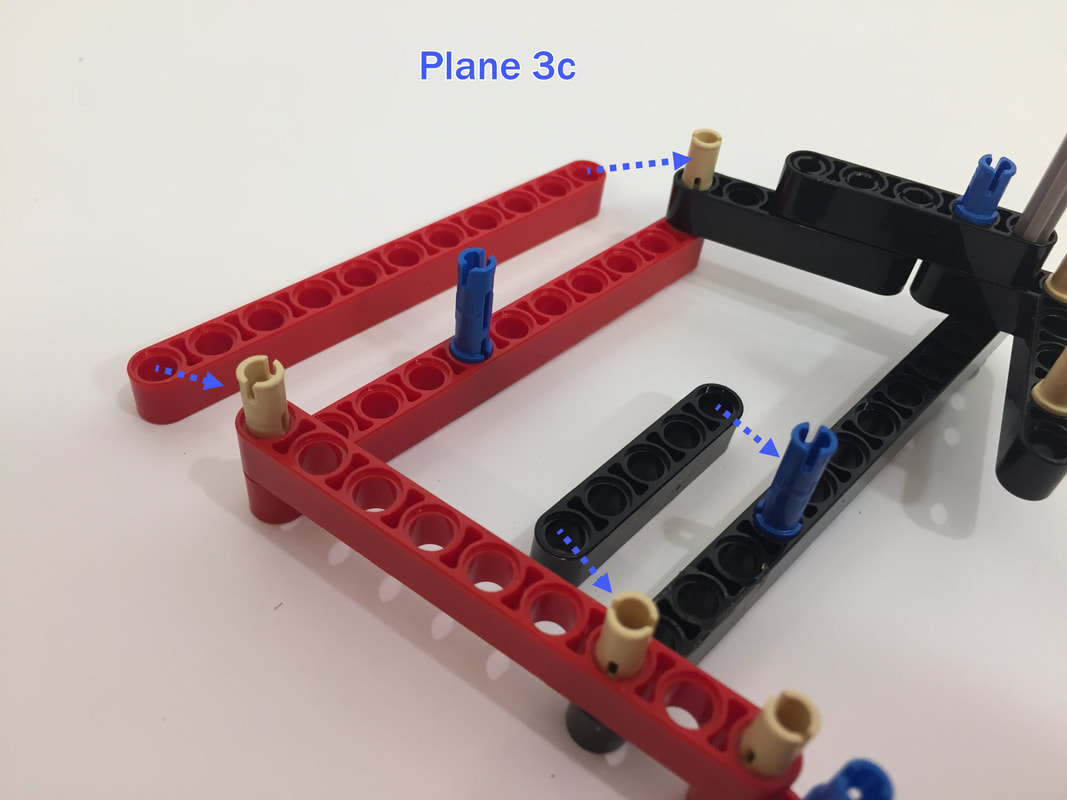
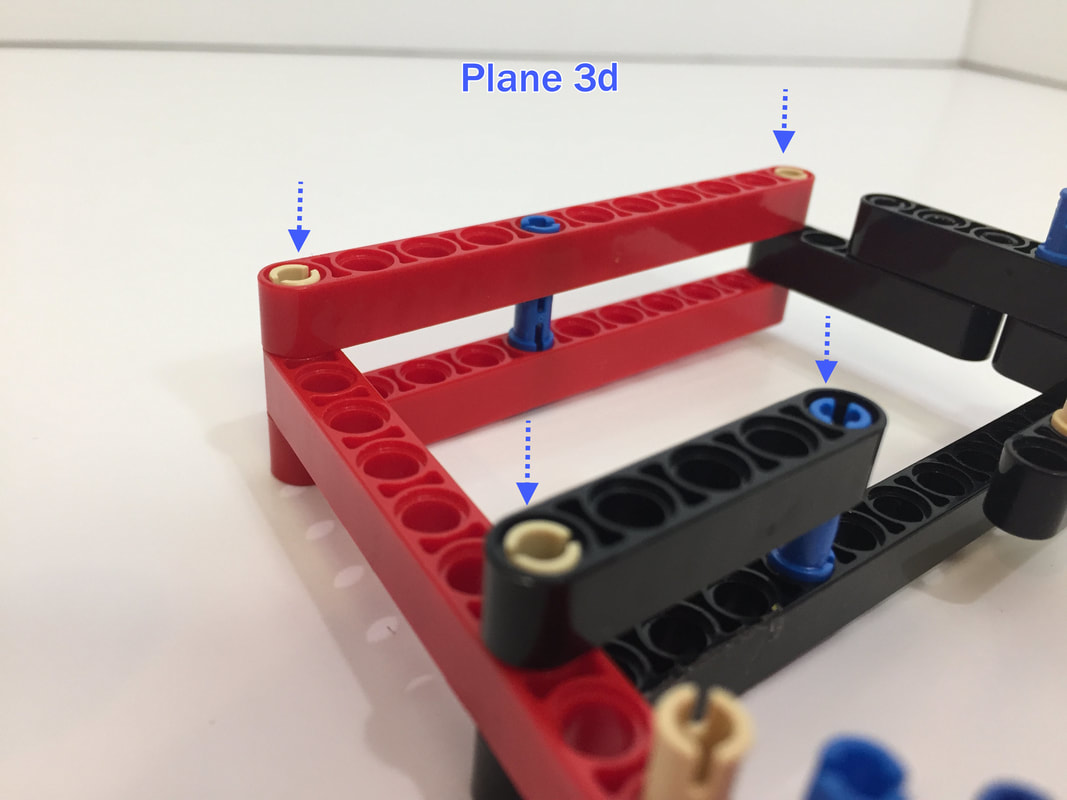
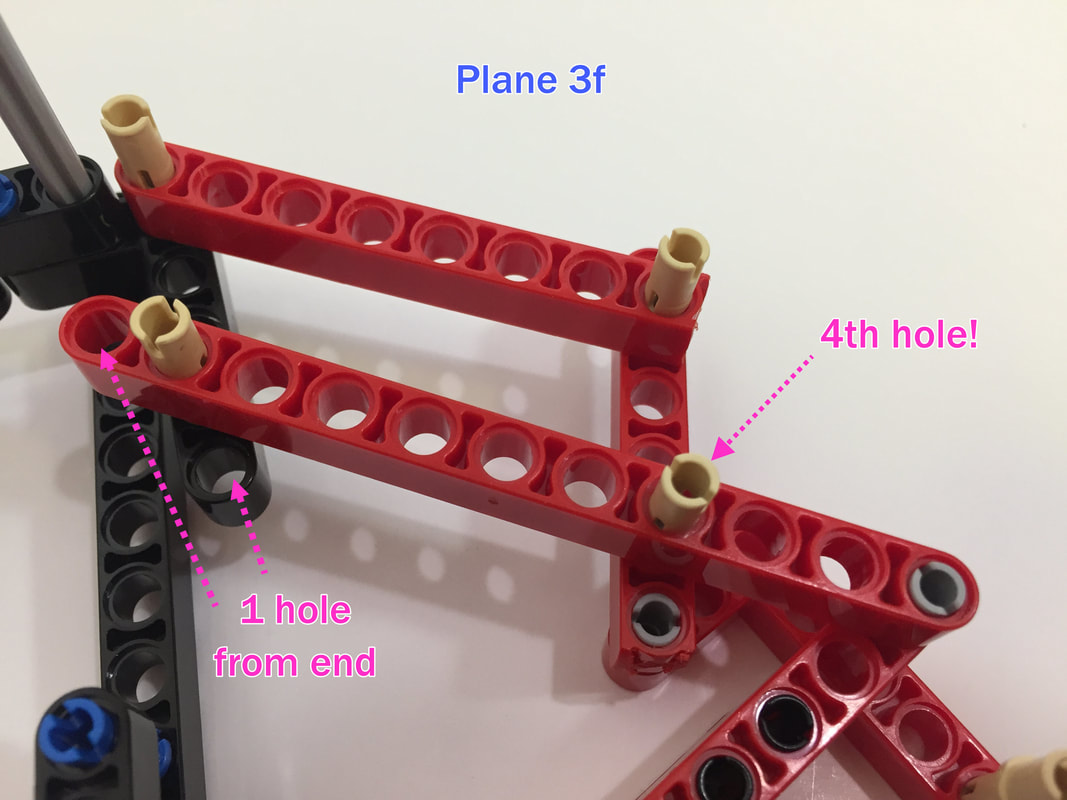
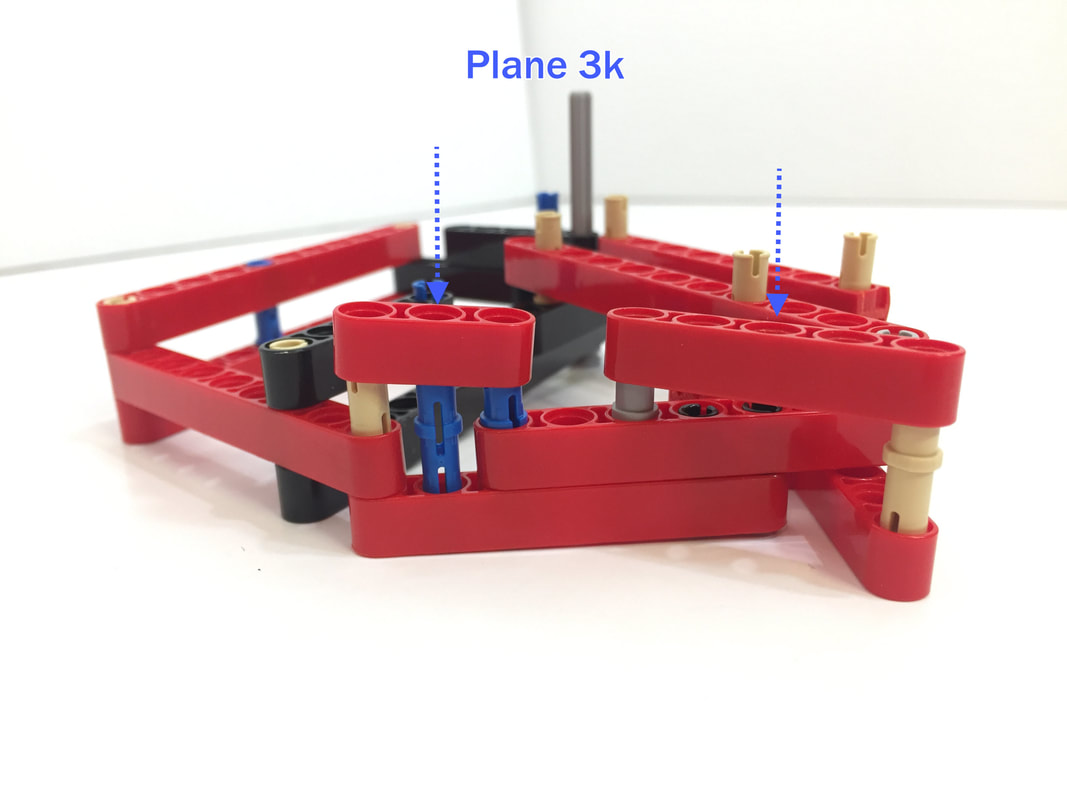
Next, add plane 3:
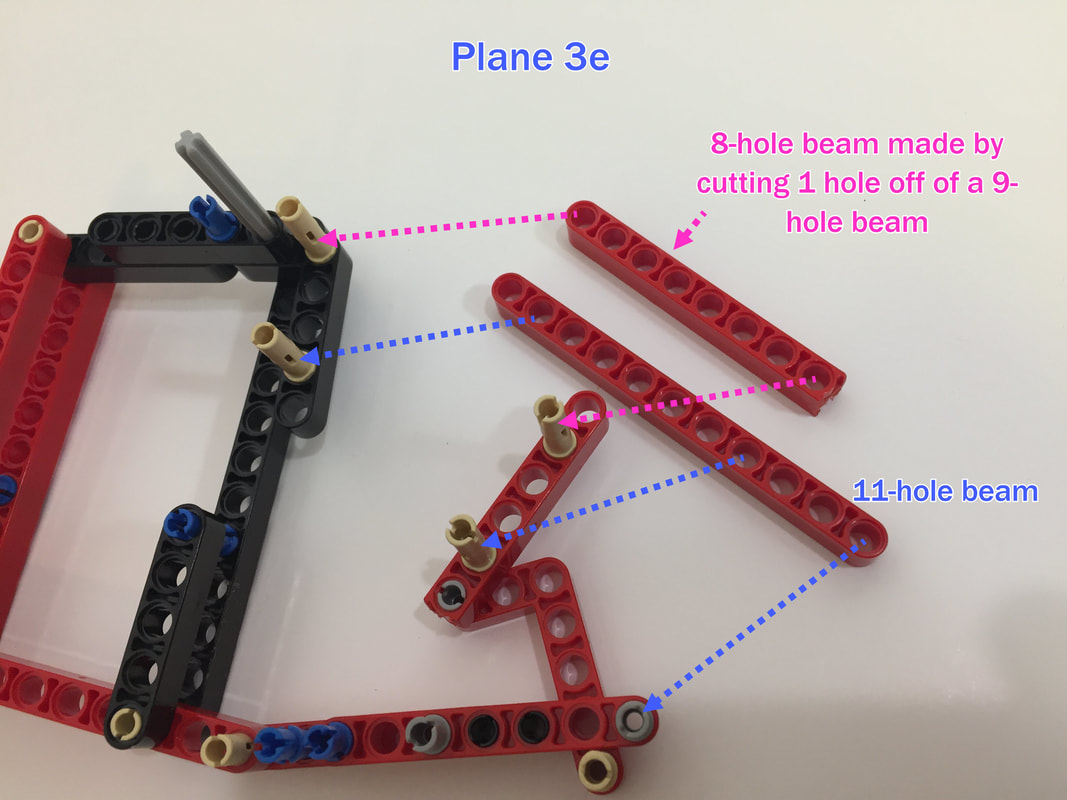
If you don't want to cut one hole off of a 9-hole beam to make an 8-hole beam, then below you can find an alternative idea
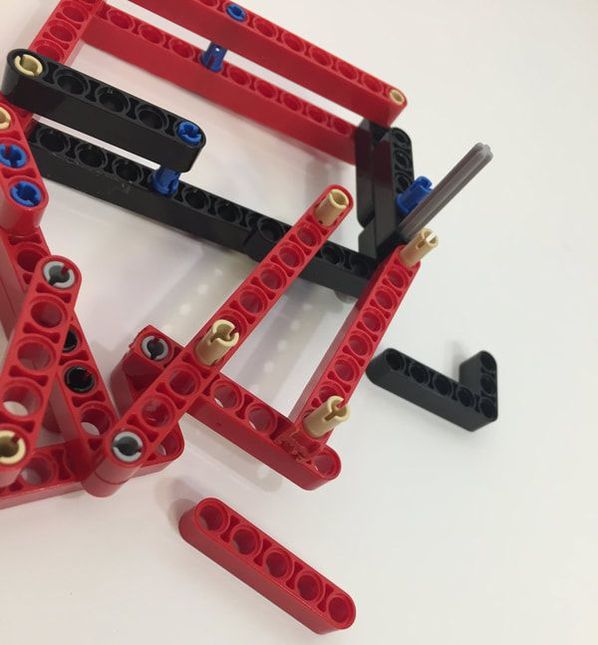
If you don't want to cut a hole off of a 9-hole beam, then below is Catweazel's solution for the leg's 8-hole beam:
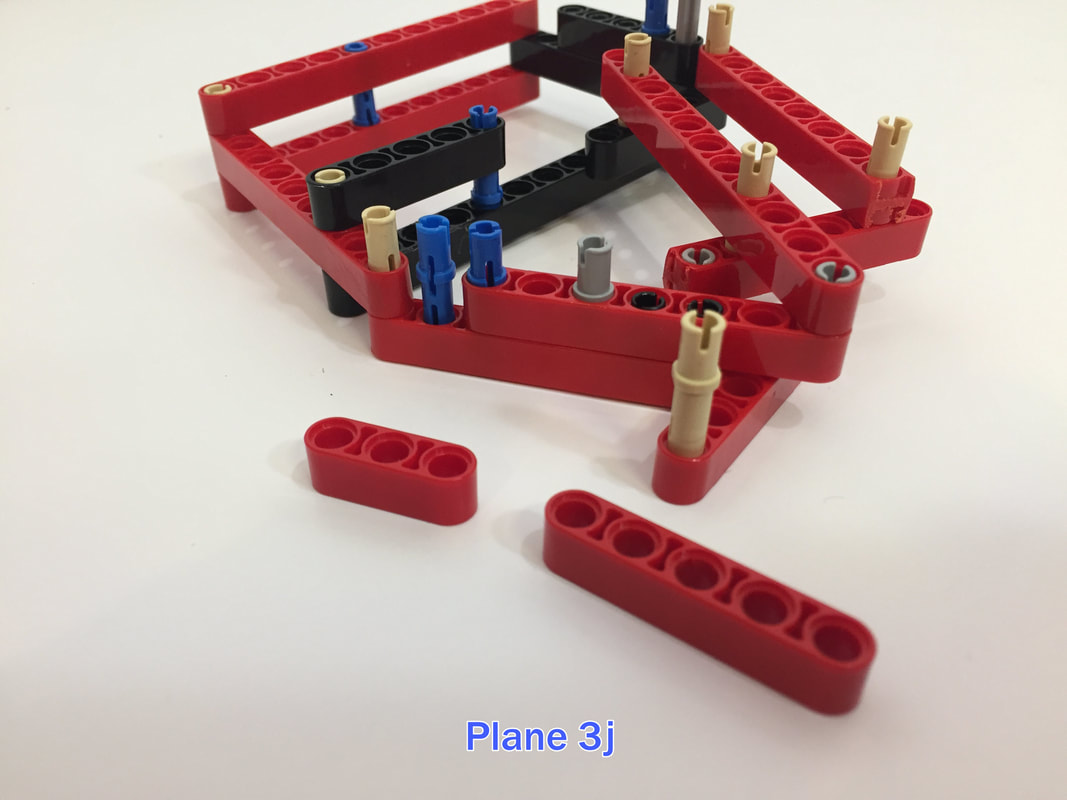
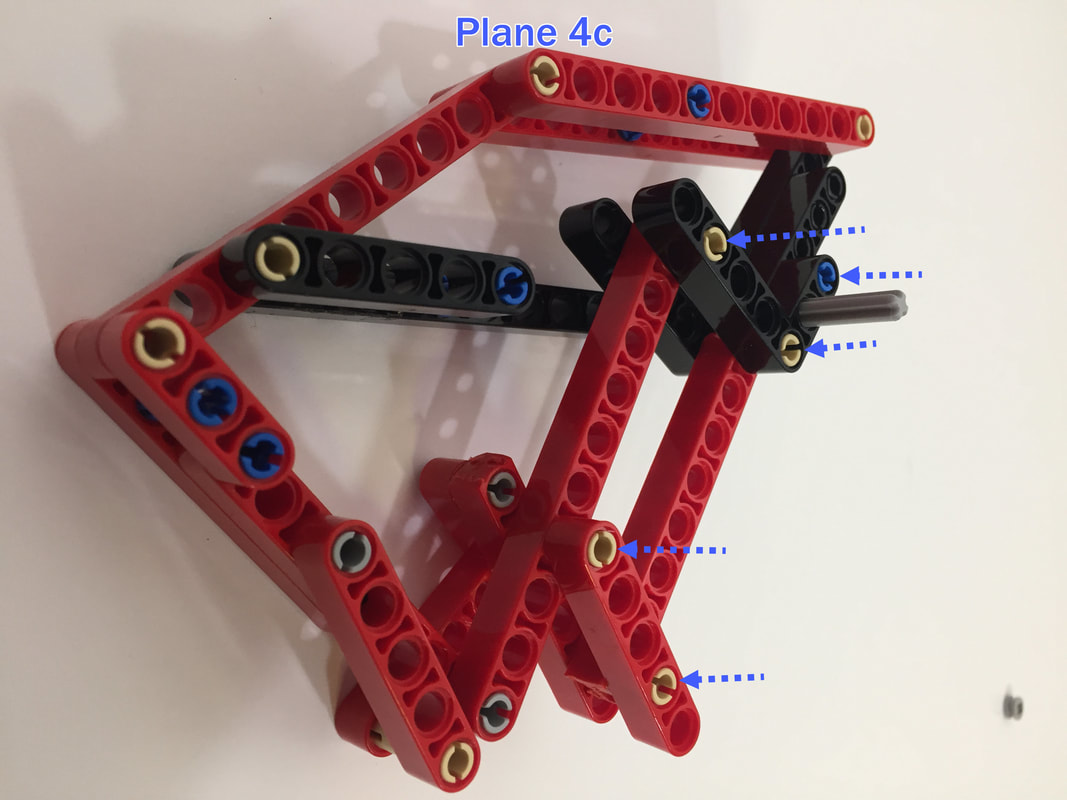
Finally, add the 4th plane:
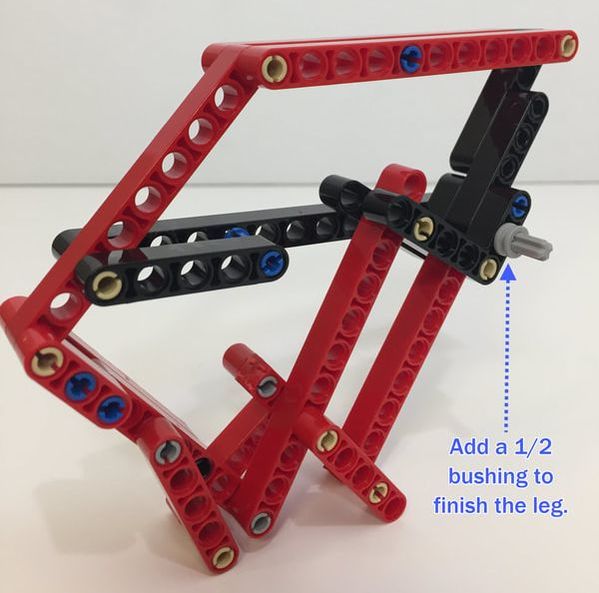
The next step would be to attach cranks to both sides of the leg's axle, and then add the frames for the version of TrotBot being built.