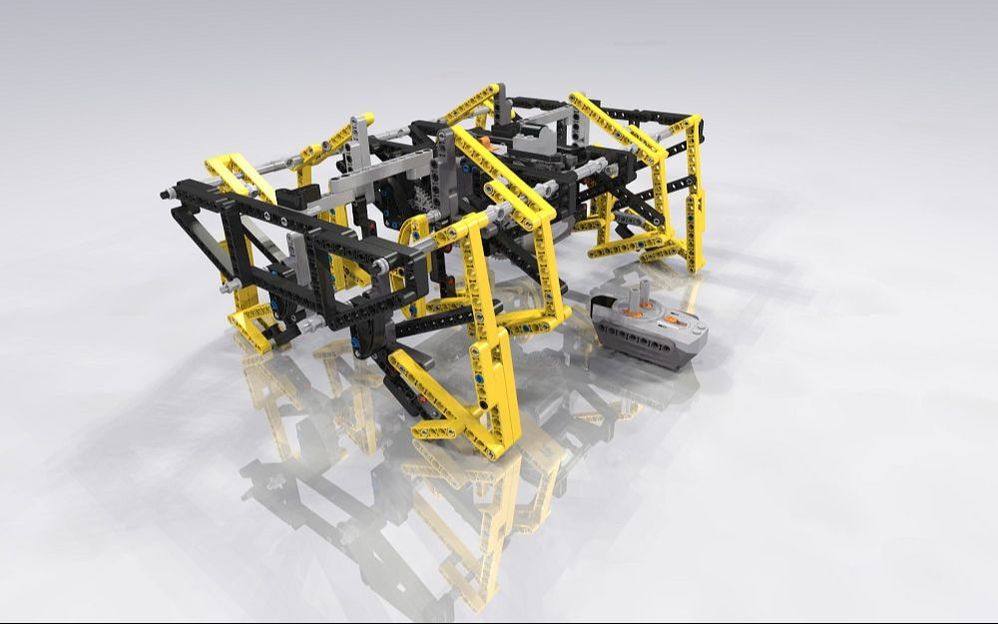
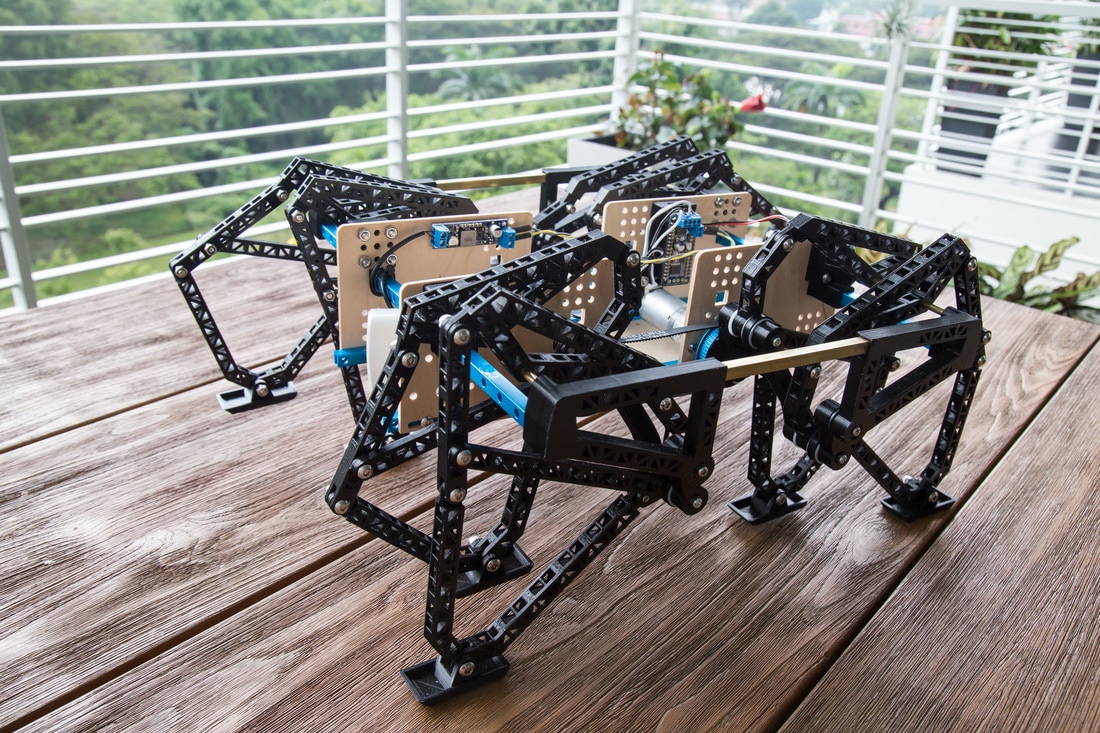
This amazing build is a work in progress by Wei Hexiang (魏 鹤翔) who is researching the use of walkers for outdoor SLAM, or "Simultaneous Location and Mapping". His double frame design allows for shorter axles, which can be a big benefit in high torque applications.
TrotBot Instructions |
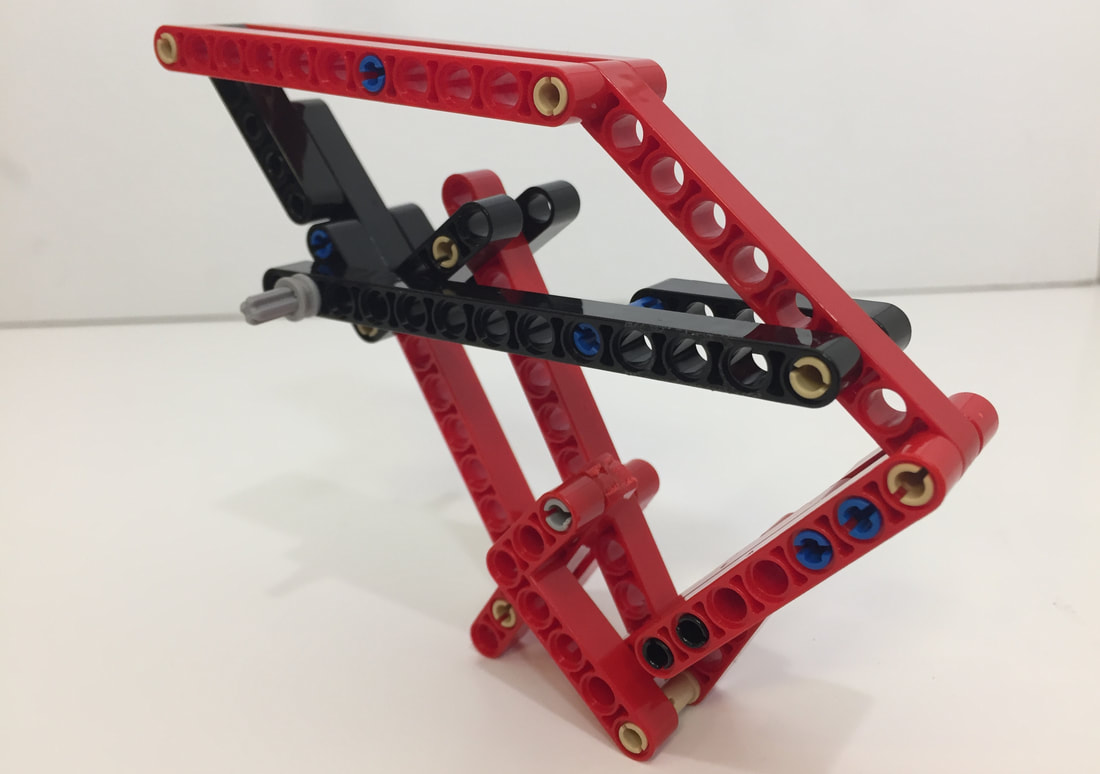
TrotBot's Linkage with its "Heel" Linkage Added
|
Simplified Instructions for Building TrotBot's Leg Mechanism
|

Quadruped TrotBot
|
|
|
TrotBot Ver 3 with Retractable Toes
|

|
|
|
|
|
|
|

|