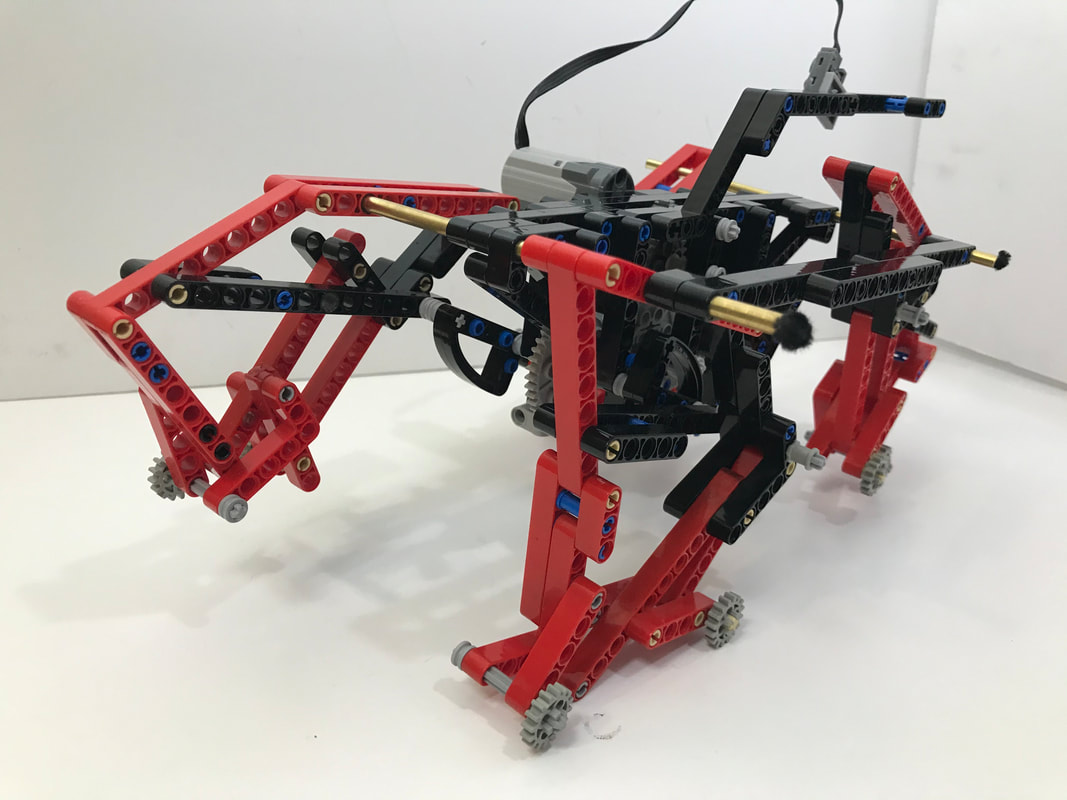
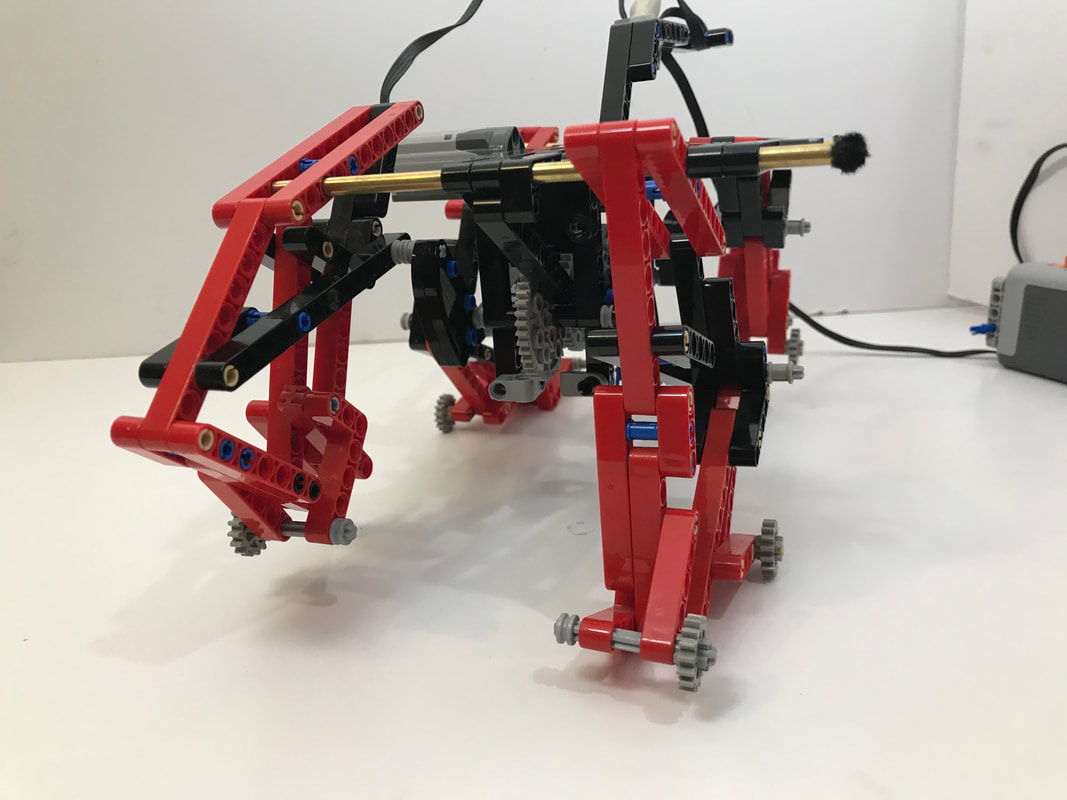
Quadruped TrotBot

As can be seen in the following video, Quadruped TrotBot uses the same building instructions as Hexapod TrotBot, but with a pair of legs and a frame side removed.
The above quadruped could barely walk on the carpeting at the end of the video due to how much it rocked back and forth, which caused its rear feet to drag. This is mitigated below by attaching some gears to the outside of the feet, which help to keep the legs vertical, reducing rocking and foot-dragging.
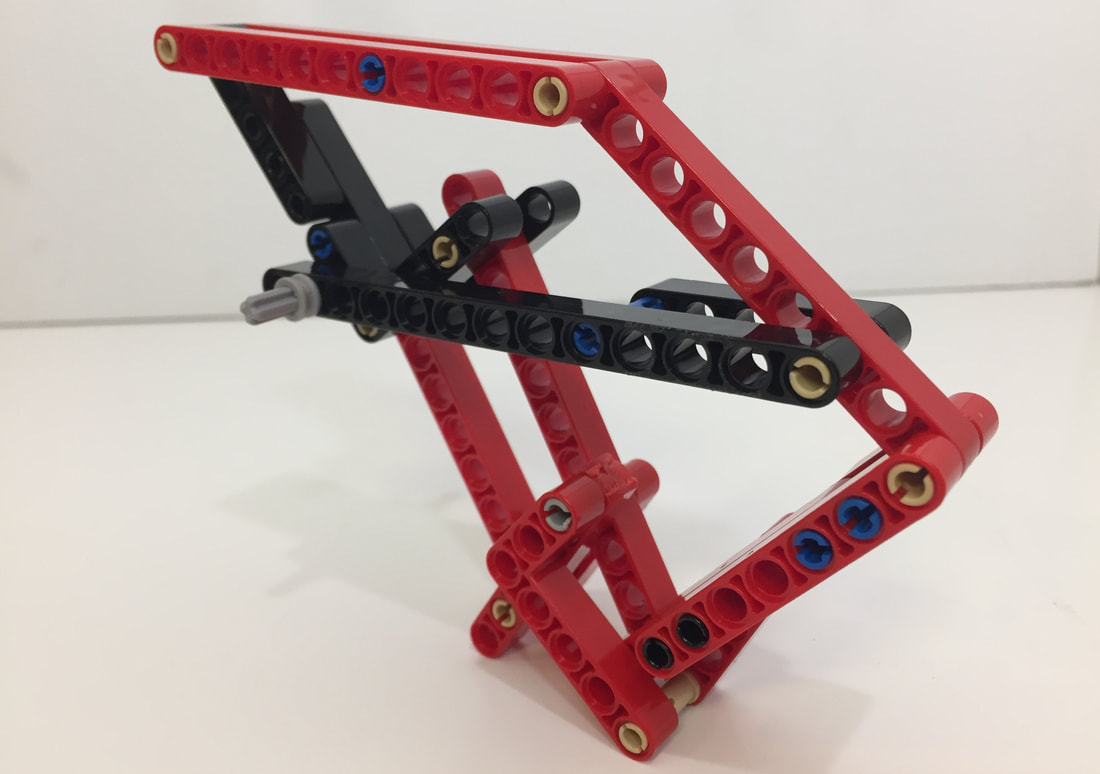
Click this image for simplified instructions to build TrotBot's legs
|
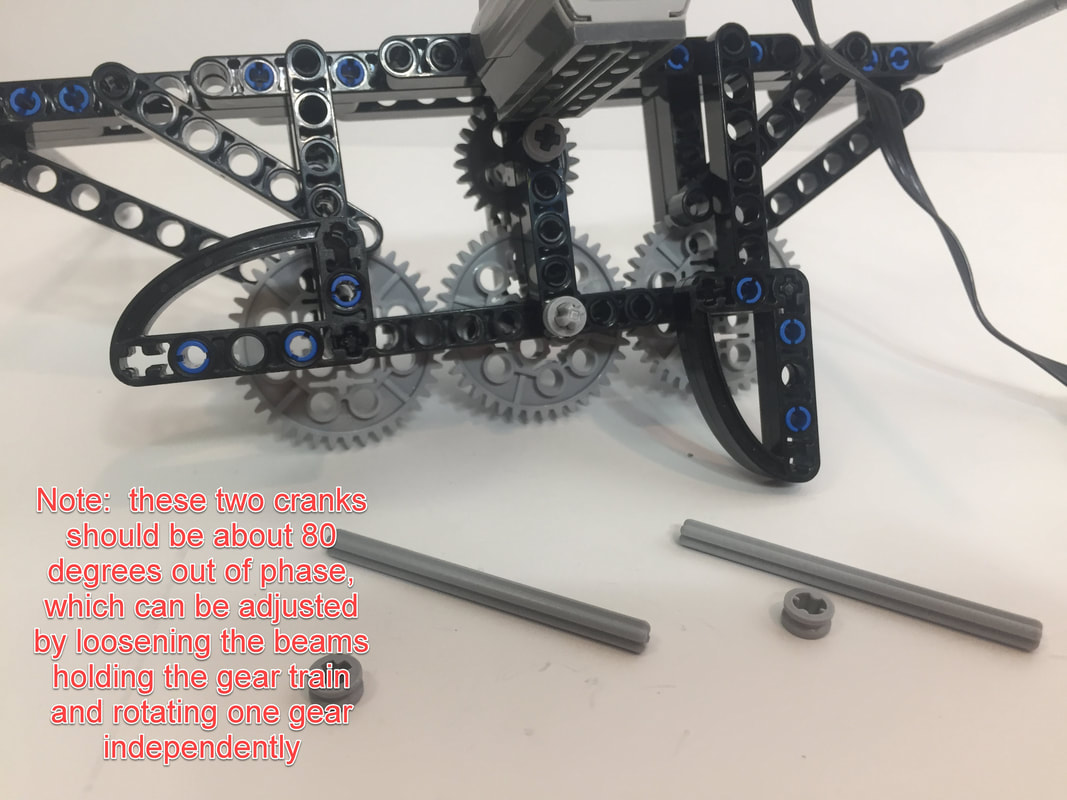
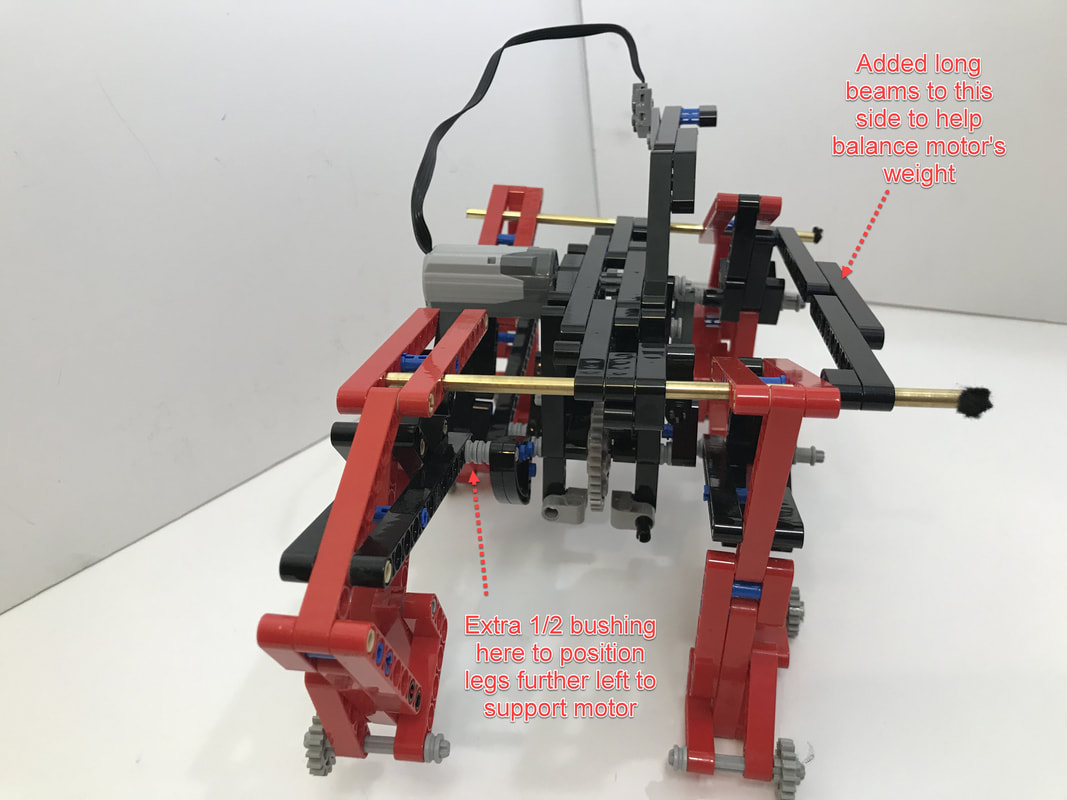
This build uses Hexapod TrotBot's frame, gear train, and cranks.
|
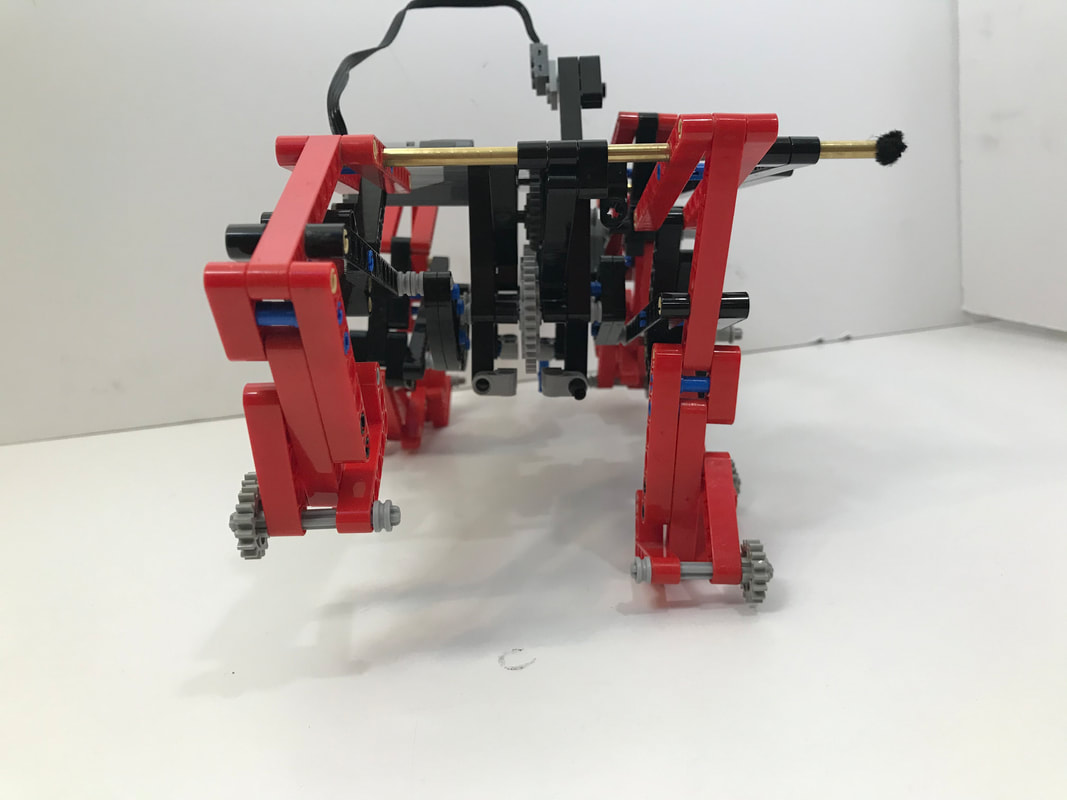
Adding gears to the outside of the toes and heels will help to keep the legs vertical and the robot balanced