6-Bar Walking Linkage Optimizer
A Basic 6-Bar Walking Linkage with a Crank and Rocker
Posted by Wade
Changing a 4-bar linkage to a 6-bar linkage allows for greater step-heights, but at a cost of less consistent foot-speed and linkage strength. Plus, the 6-bar's knee joint tends to hyperextend inward more easily than the 4-bar's knee joint (its dead-point is more problematic).
Changing a 4-bar linkage to a 6-bar linkage allows for greater step-heights, but at a cost of less consistent foot-speed and linkage strength. Plus, the 6-bar's knee joint tends to hyperextend inward more easily than the 4-bar's knee joint (its dead-point is more problematic).
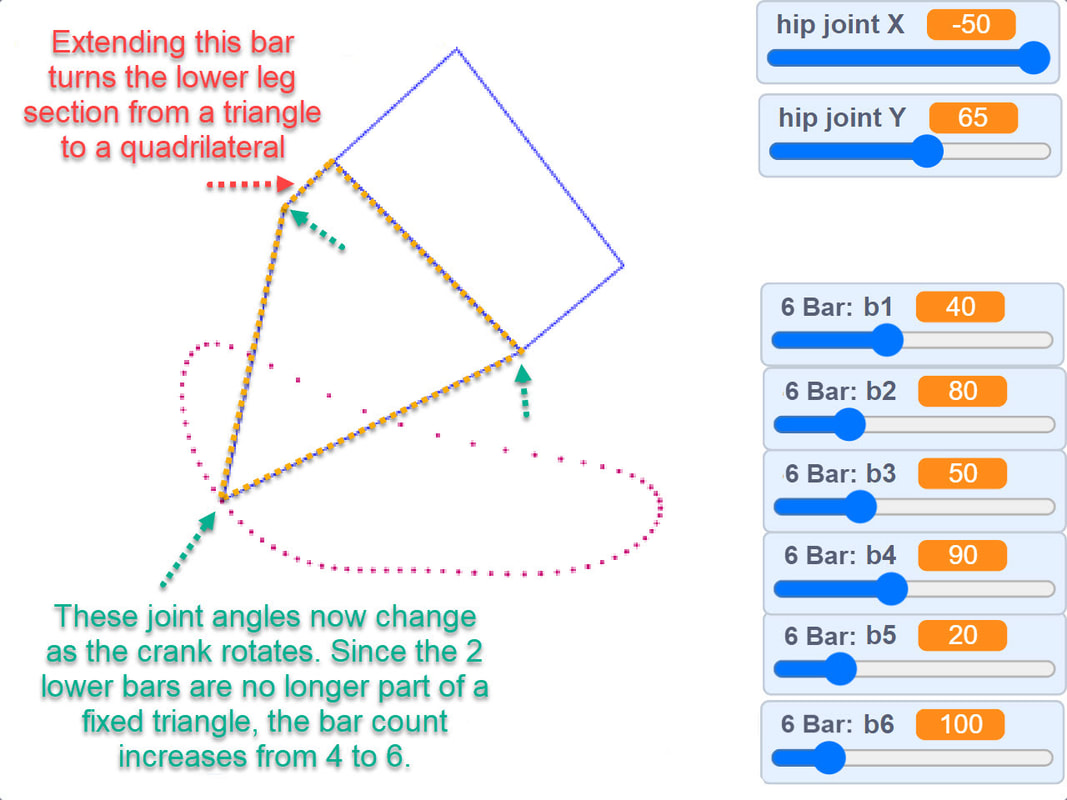
Changing a 4-Bar Linkage to a 6-Bar Linkage by Extending the Rocker Bar (B3)
Below is the bar map for adjusting the linkage in the simulator below
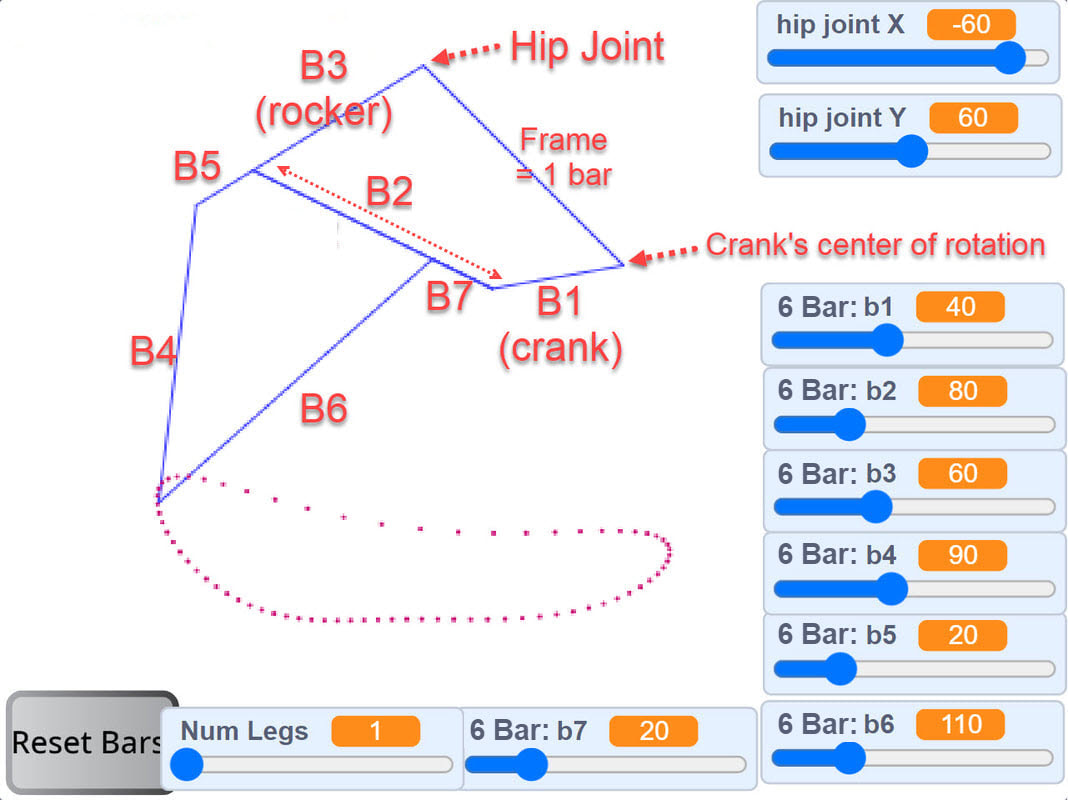
NOTE: B7 is the hamstring's upper connection's distance from the crank - it does not affect the length of B2 (which extends to the crank)
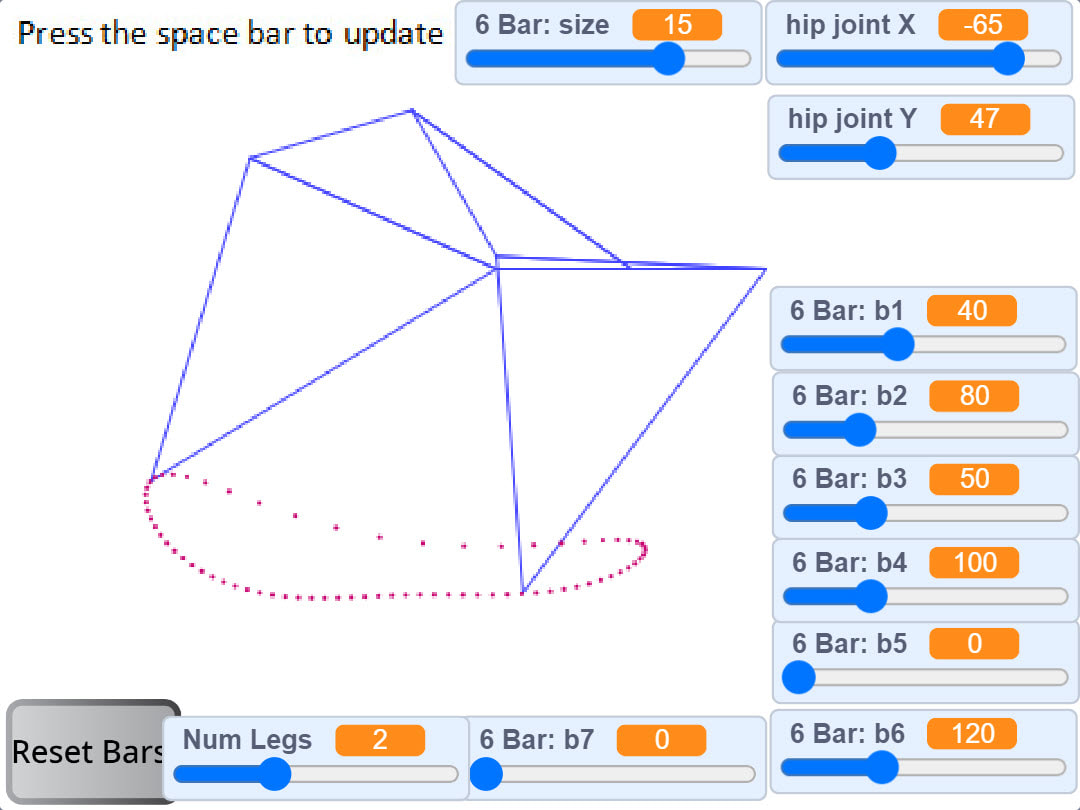
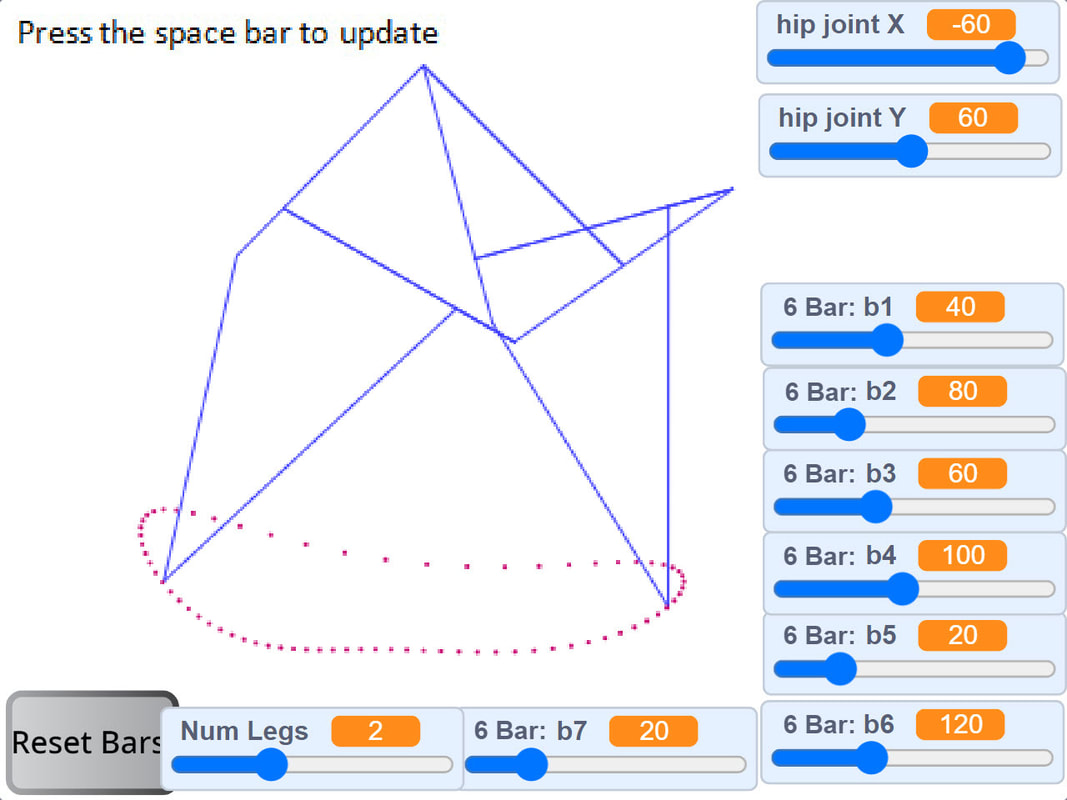
Below is the interactive simulator. It allows you to simulate between 1 and 4 legs to make it easier to gauge the amount of foot contact at each corner of the robot. The sim is started by clicking the green flag. You can also run it on MIT's site where you can modify the Scratch code.
After changing a bar's length, click somewhere other than a slider bar and then press the space bar to see the new linkage, and use your keyboard's left/right arrows to rotate the crank.
Below is the interactive simulator. It allows you to simulate between 1 and 4 legs to make it easier to gauge the amount of foot contact at each corner of the robot. The sim is started by clicking the green flag. You can also run it on MIT's site where you can modify the Scratch code.
After changing a bar's length, click somewhere other than a slider bar and then press the space bar to see the new linkage, and use your keyboard's left/right arrows to rotate the crank.
A description of the algorithms, and how we used them to simulate linkages, is here.
When building a simulated linkage in LEGO, remember to use beams with one more hole than the bar's length. For example, a bar of length 8 requires a LEGO beam with 9 holes, because when determining the length of LEGO beams, the first hole is always counted as zero.
Below are few example possibilities of 6-bar walking linkages, but remember, just because something looks good in a simulation does not necessarily mean it work well when built, at least not without some tinkering such as mitigating the tendency of this linkage's knee joint to hyperextend inward.
To start, below Spot Micro Ver 2's linkage with longer legs has been simulated. Although it is a 4-bar linkage it can still be simulated by setting B5 = 0.
Spot Micro Ver 2 with longer legs that will collide with the rear legs unless the front and rear cranks are separated
The following linkages have 6-bars. Be sure to build and test the legs before building an entire robot!
Notice the foot-speed increases on the right side of the foot-path (the space between the red dots gets wider)
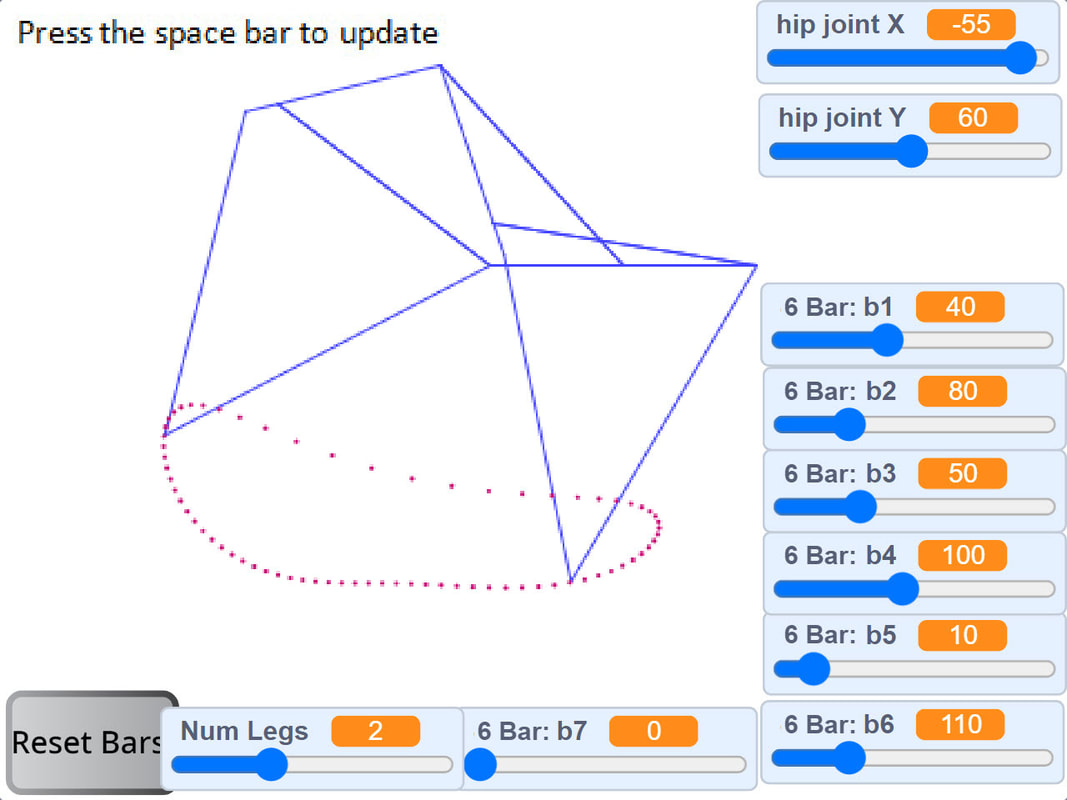
Notice the foot-speed increases on the right side of the foot-path (the space between the red dots gets wider)
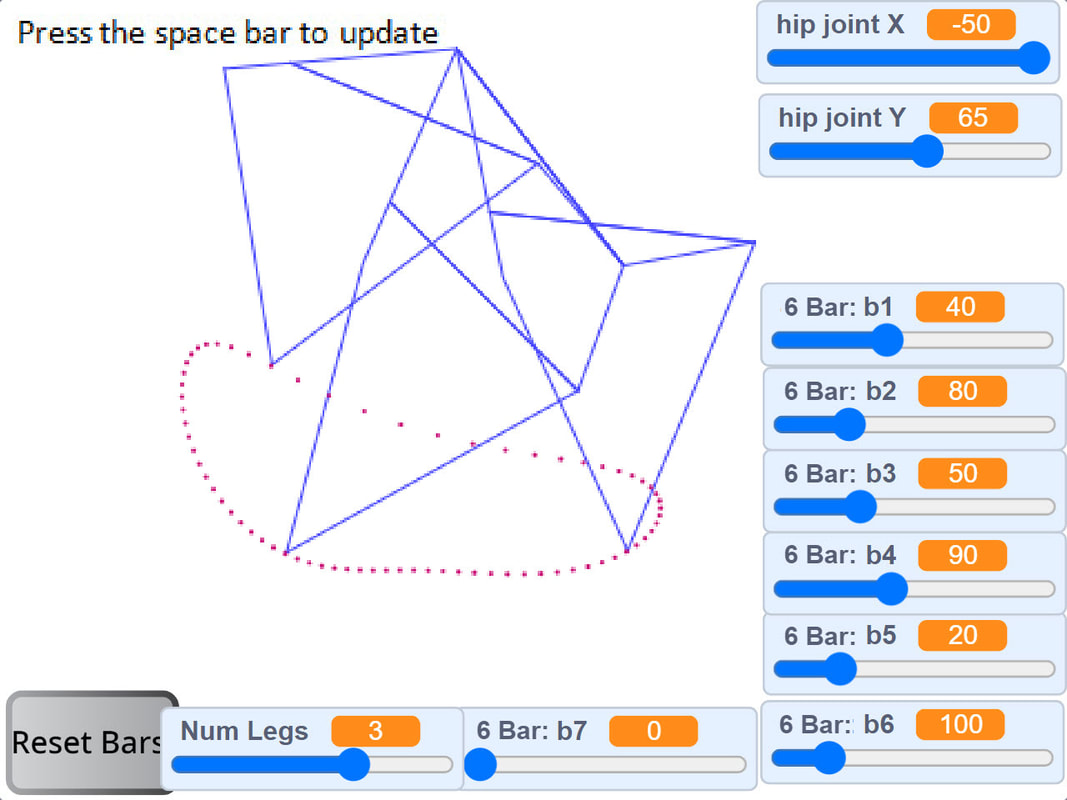
Notice the foot-speed increases on the right side of the foot-path (the space between the red dots gets wider)
Check out MaxBrix's high-stepping 6-bar linkage walker: