Large-Scale TrotBot

Team TrotBot back in 2015
 TrotBot Ver 0
TrotBot Ver 0
Some more images of our bamboo TrotBot Ver 1 demo at the maker faire can be found here, and you can find an overview of our "Ver 0" wooden scale up here.
"In my opinion, there's a lot going for the 'mechanical' world, albeit anachronistic in this day and age of electronics and computers. The mechanical problems arise particularly when scaling up - vibration, heavy weight, material costs, etc. It is far easier to 'fine tune' a design in compensating programming. However, I've also seen code where, most likely due to a lack of fundamental understanding of the basic principles, spent more time compensating for an initial bad design than getting the real job done. There's a lot to be said for simplicity and parsimony."
--Reuben Hoggett, creator of the Cybernetic Zoo, commenting on our TrotBot scaleup attempt
If anyone else is crazy enough to attempt scaling up TrotBot, then you may want to build it in a 12 leg version, rather than the 8 leg version with heels and toes that we tried:
--Reuben Hoggett, creator of the Cybernetic Zoo, commenting on our TrotBot scaleup attempt
If anyone else is crazy enough to attempt scaling up TrotBot, then you may want to build it in a 12 leg version, rather than the 8 leg version with heels and toes that we tried:
|
|
On the other hand....
- 12 legs would make for a significantly wider walker, which would require more structure and weight
- The heel/toe linkages reduce TrotBot's torque requirements, and eliminating them would require stronger axles, and possibly a more powerful motor
Even with 12 legs you would need to add feet, so maybe explore shock-absorbing feet, perhaps like the feet used by the Mondo Spider in the video below. Also, notice how Mondo's feet were designed to slide, which helps to smooth Klann's speed, and also makes tank-style turning feasible for large mechanical walkers - at least on smooth terrain.
Or, perhaps small inflatable tires that could rotate a little to improve tank-style steering could also smooth TrotBot's gait somewhat, like Prof Joseph Shigley's shock-absorbing inflatable rubber-feet? Of course, a lot of prototyping would be required to dial this in!
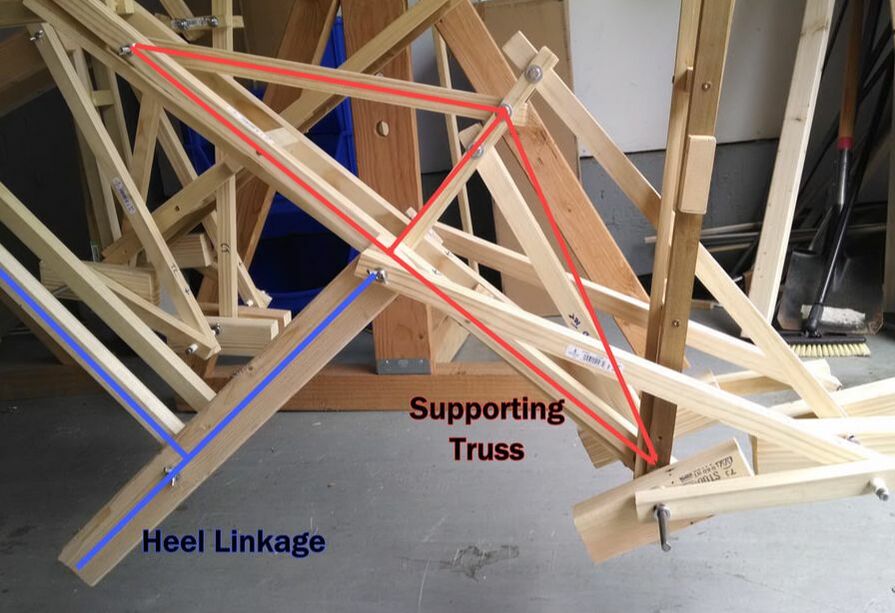
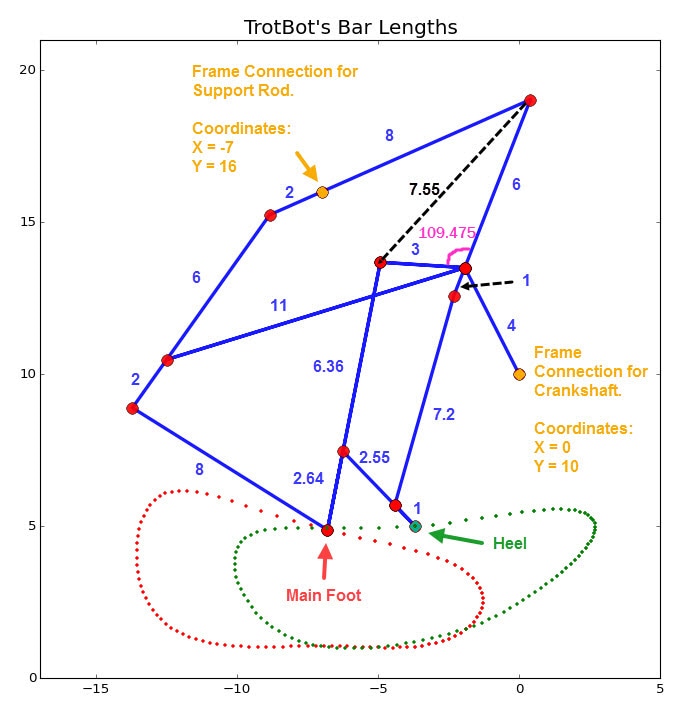
Below are the bar lengths of the large-scale TrotBot Ver 1 we started building out of bamboo - which we never finished since bamboo's variable geometry can require a lot time to turn it into precision parts, plus the joints require reinforcing so that the bamboo doesn't split. Please note that the triangle's bottom right angle highlighted in pink is not 90 degrees, but is 109.475 degrees. You can find more details on the linkage, as well as the dimensions for the retractable toes on TrotBot's Linkage Plans page.
|

Bamboo has incredibly high strength to weight ratios, but its variable geometry can require a lot of time to turn it into precision parts, and the joints need to be reinforced with carbon fiber since bamboo splits easily
|

|

|
Adding carbon fiber where the holes will be drilled through the bamboo