Strider Ver 2's Leg Mechanism Simplified

A Linked Pair of Strider's Legs (Ver 2)

A couple of things I learned from teaching my walking robot class are that instructions that are too long often don't get read, and also that sometimes the students built legs that weren't straight, causing the linkage to bind and jam. Hopefully these leg-only instructions will help!
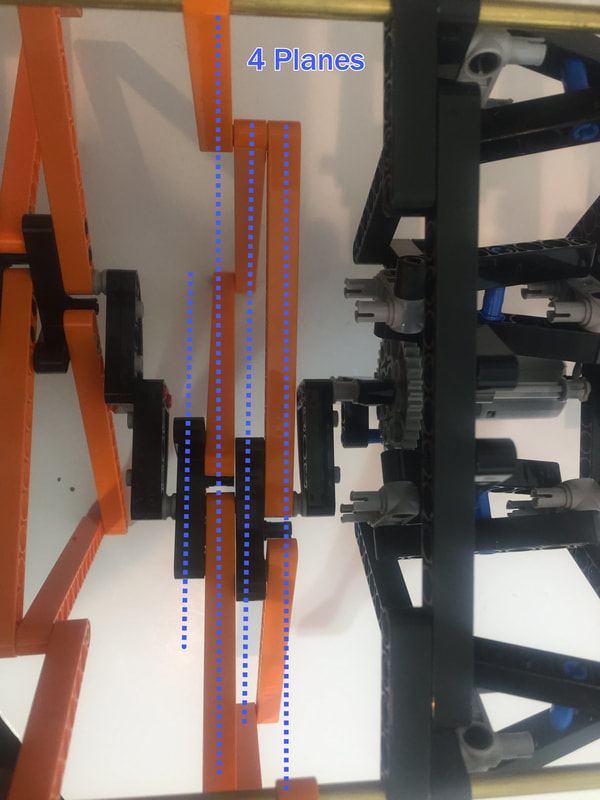
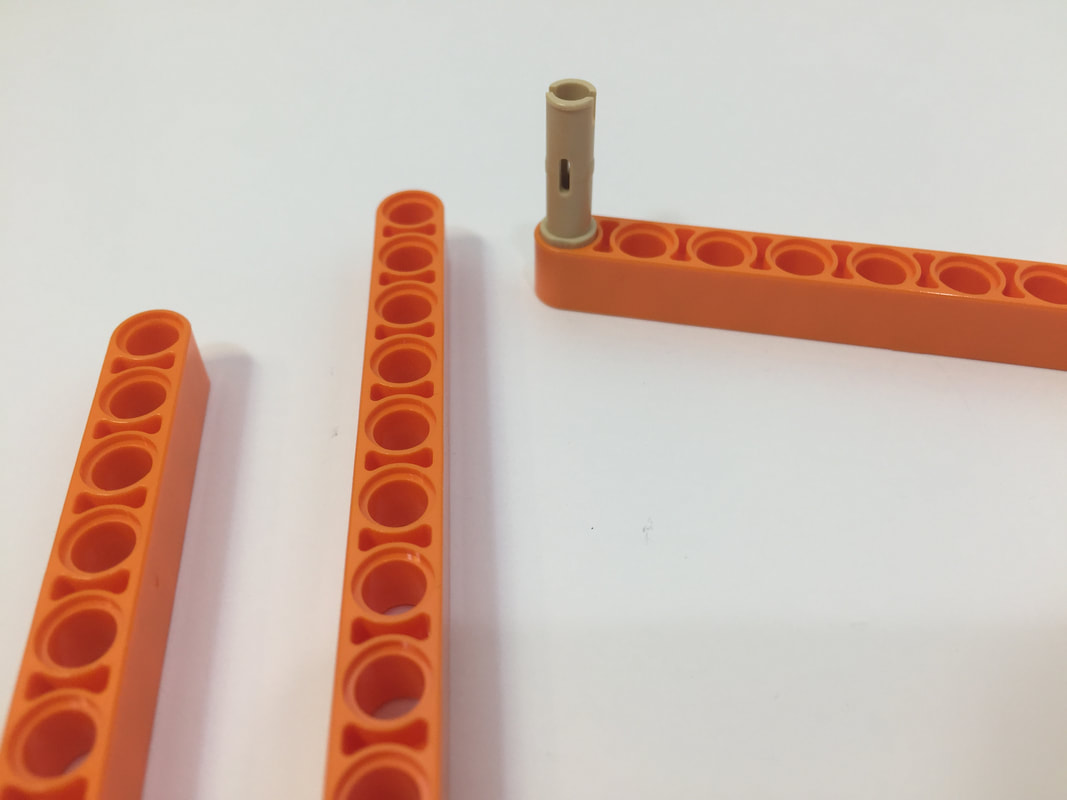
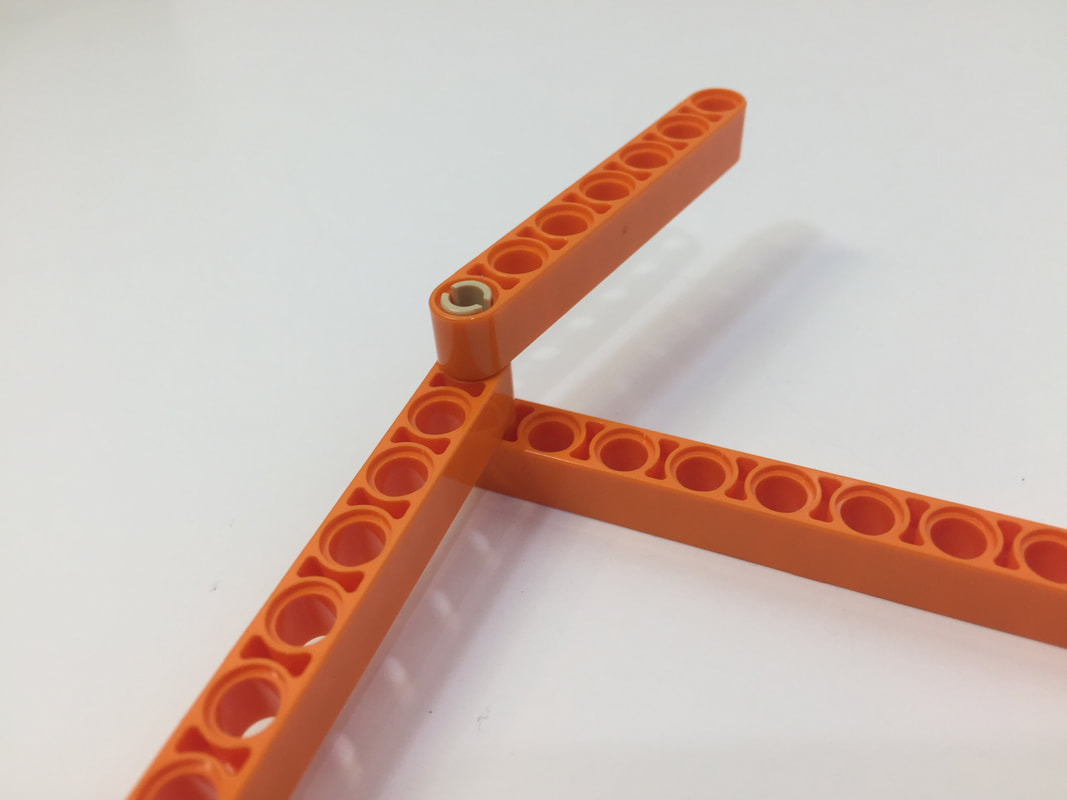
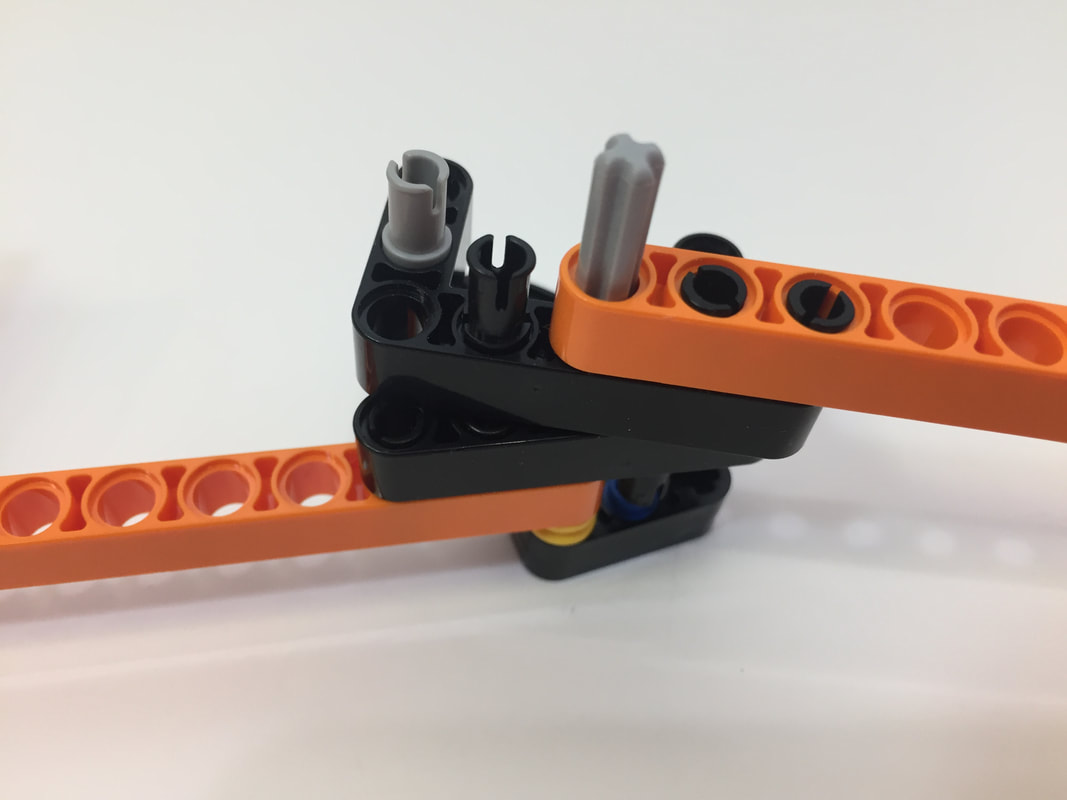
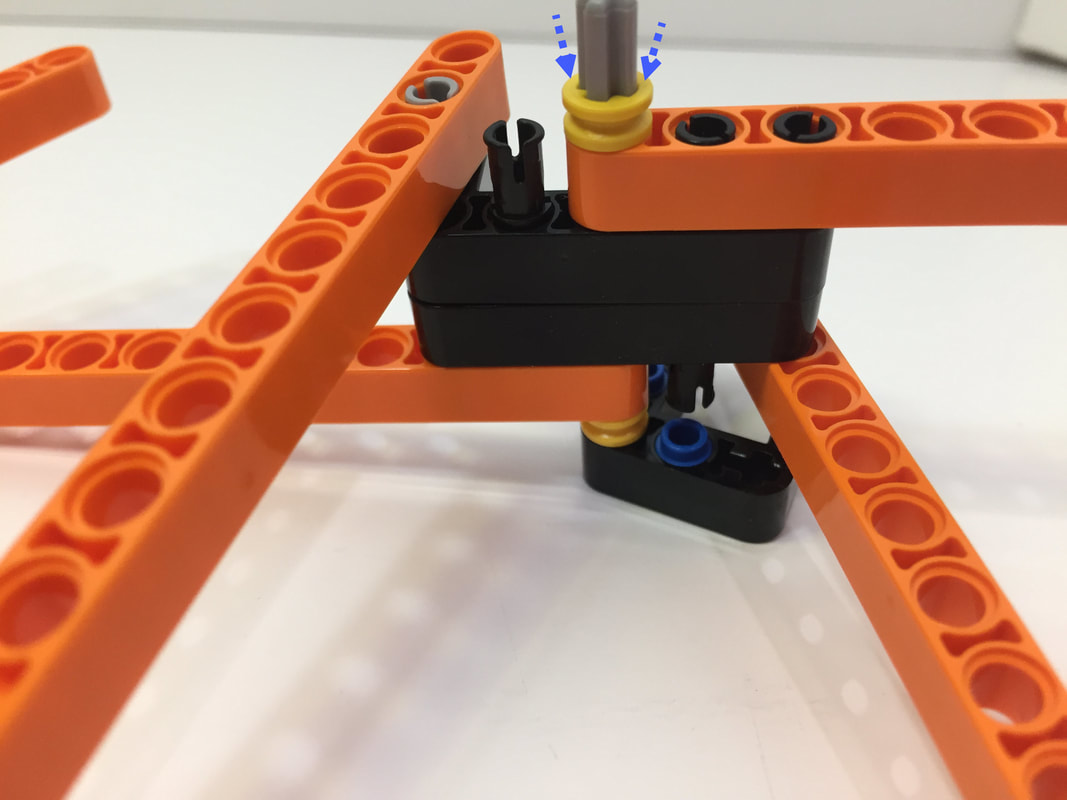
To build legs that don't bind or jam, parts need to connect to parts in adjacent planes
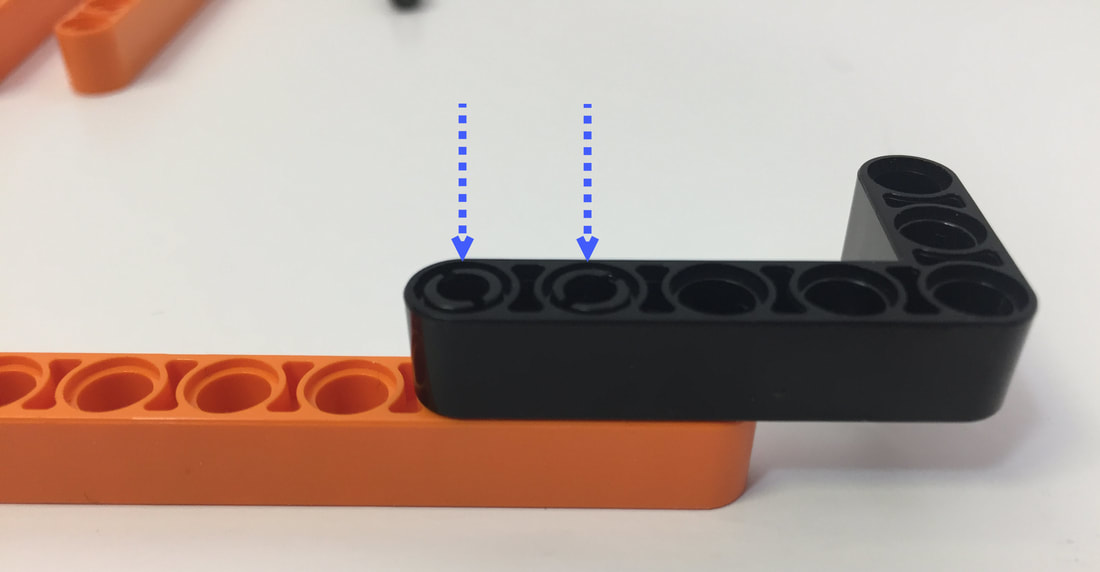
Build 8 of the following legs:
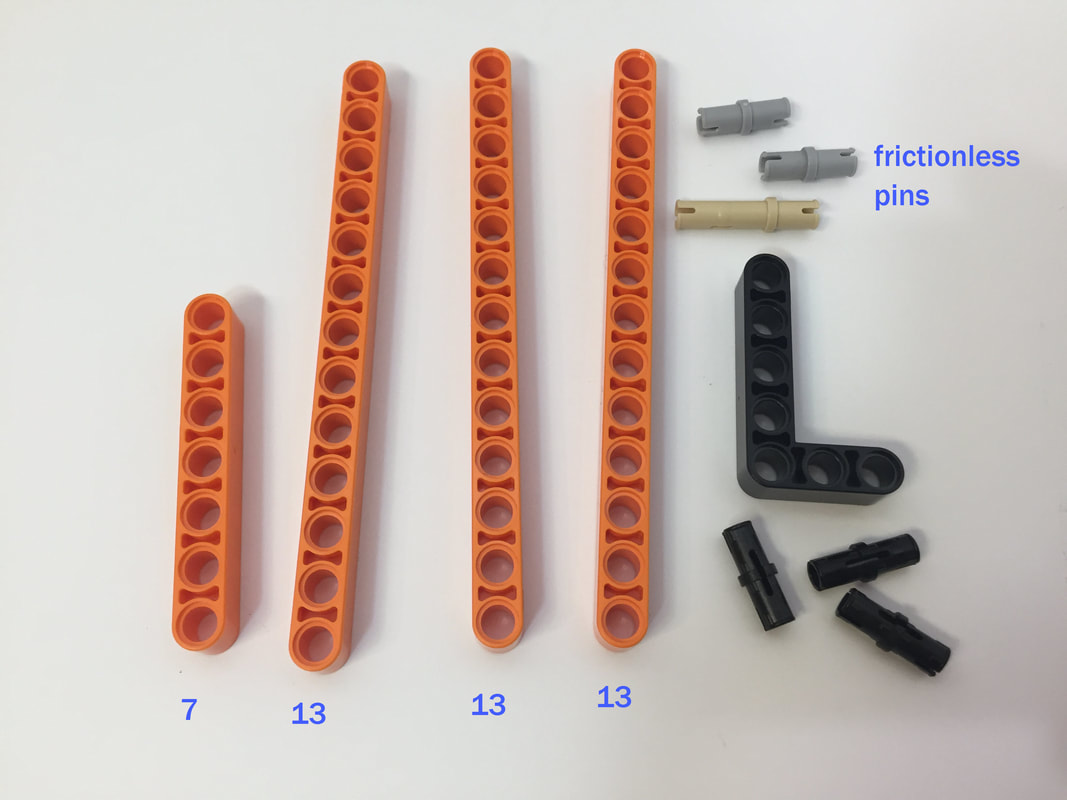
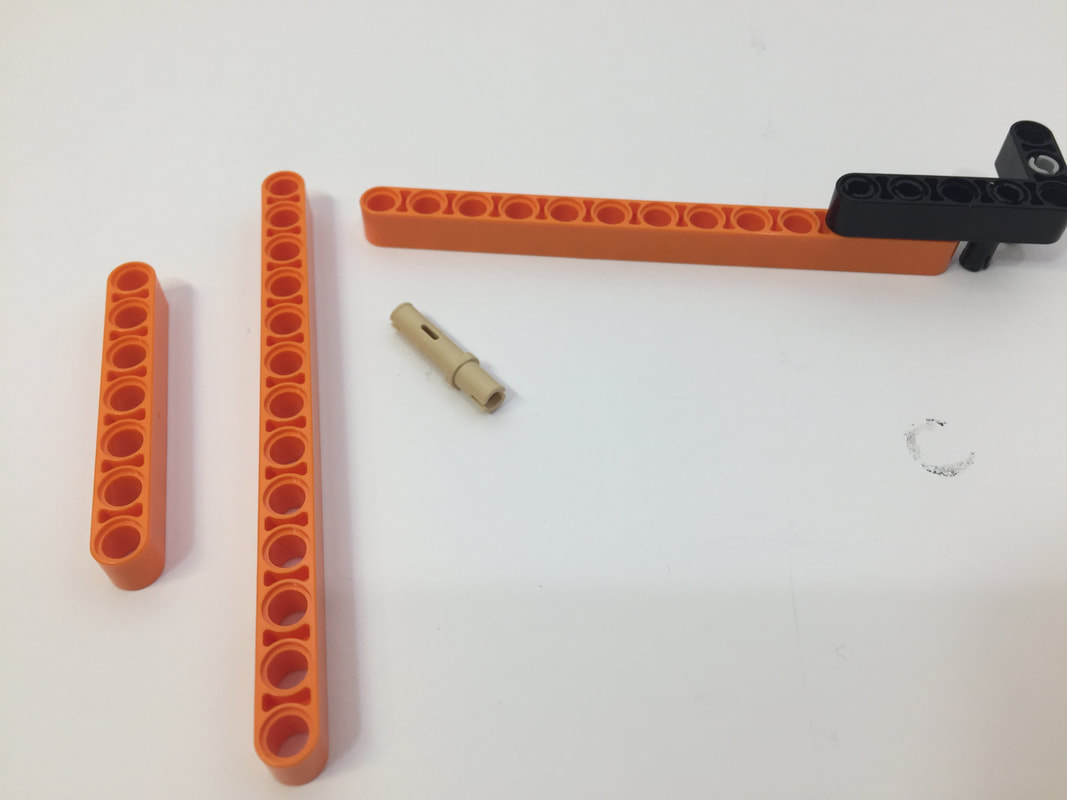
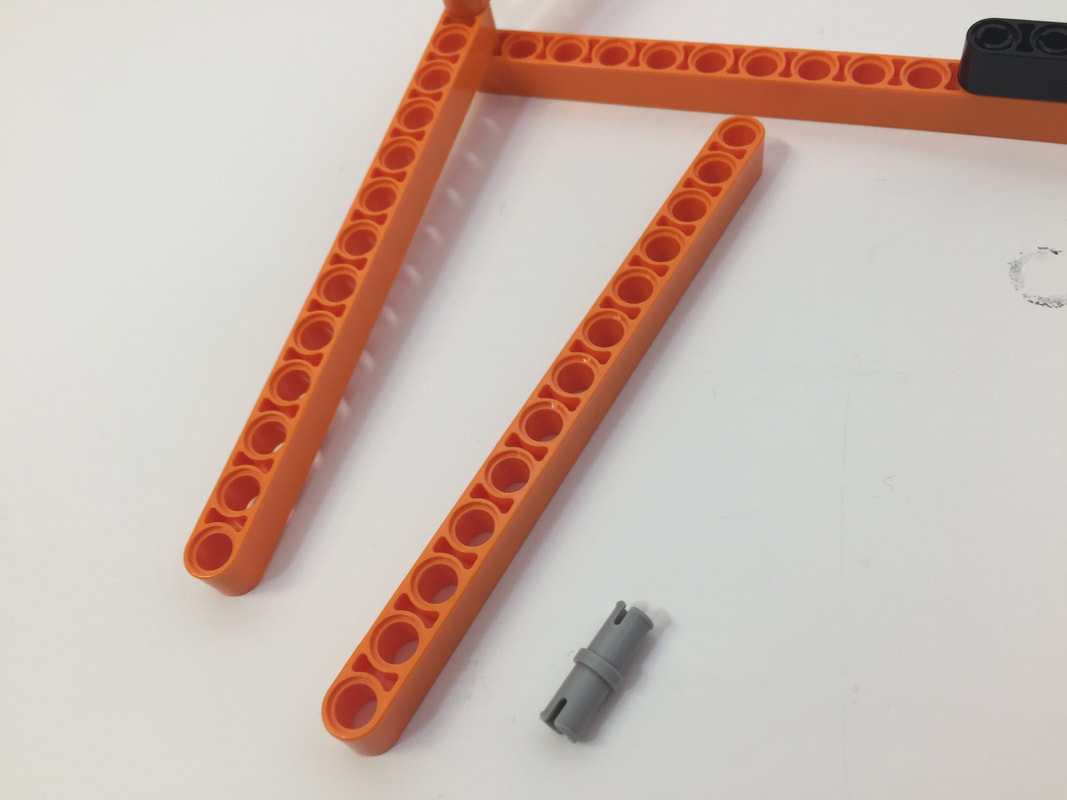
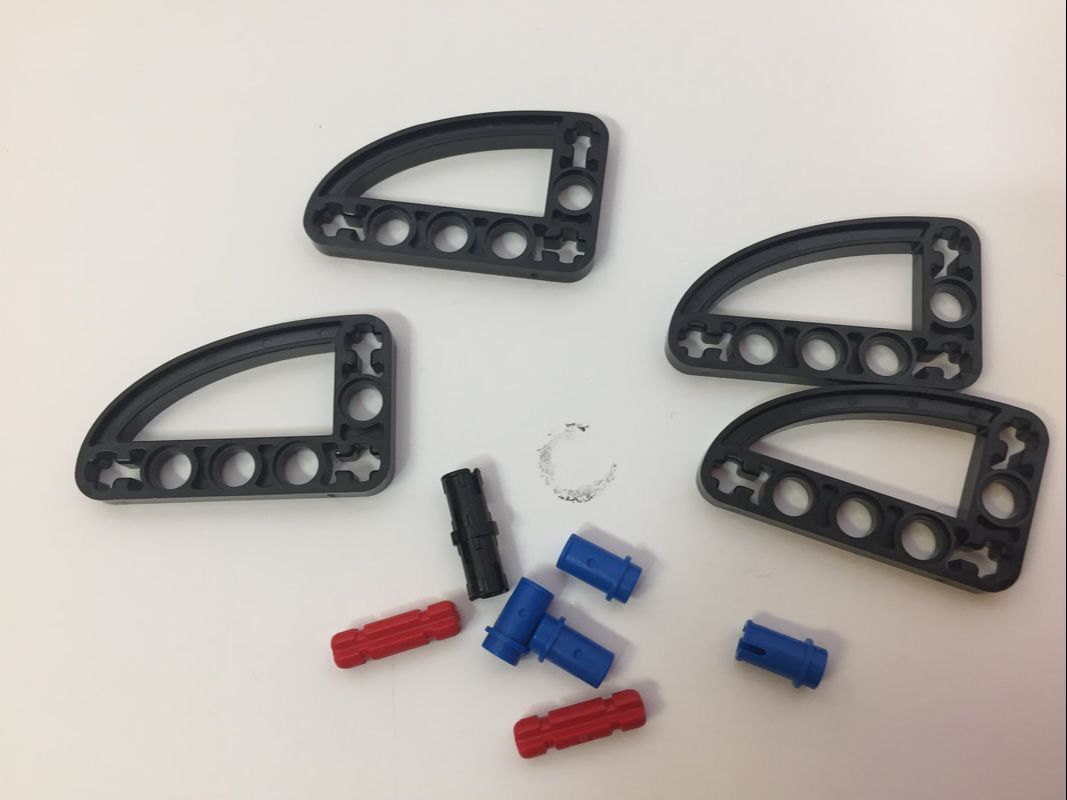
Parts required for one leg
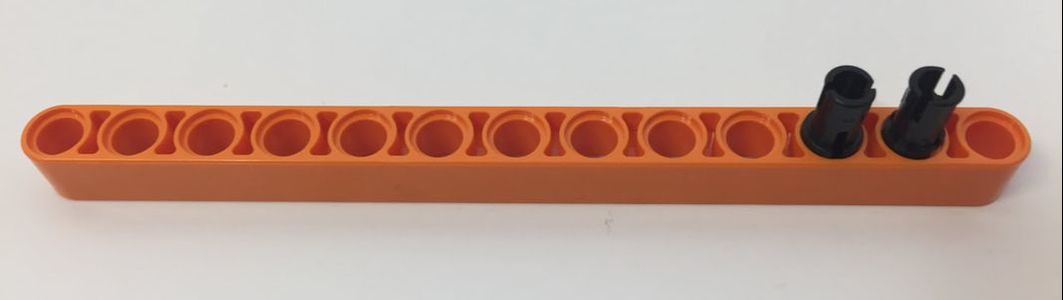


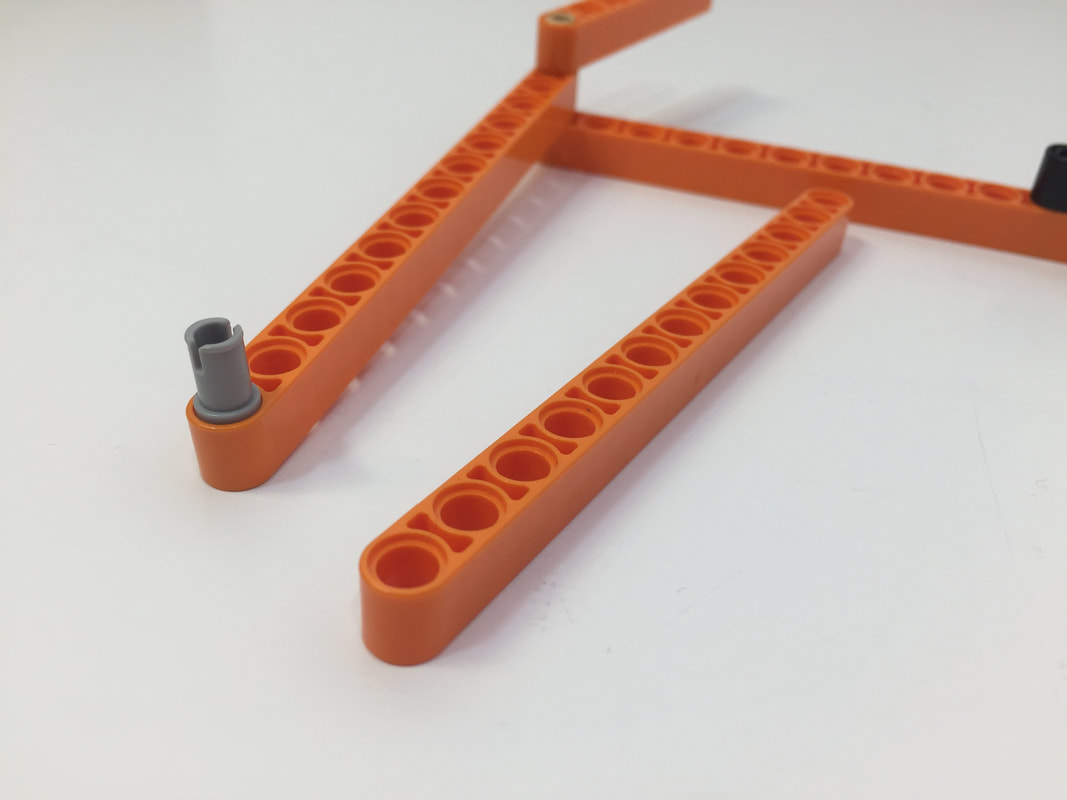
Flip the parts over to attach the pins
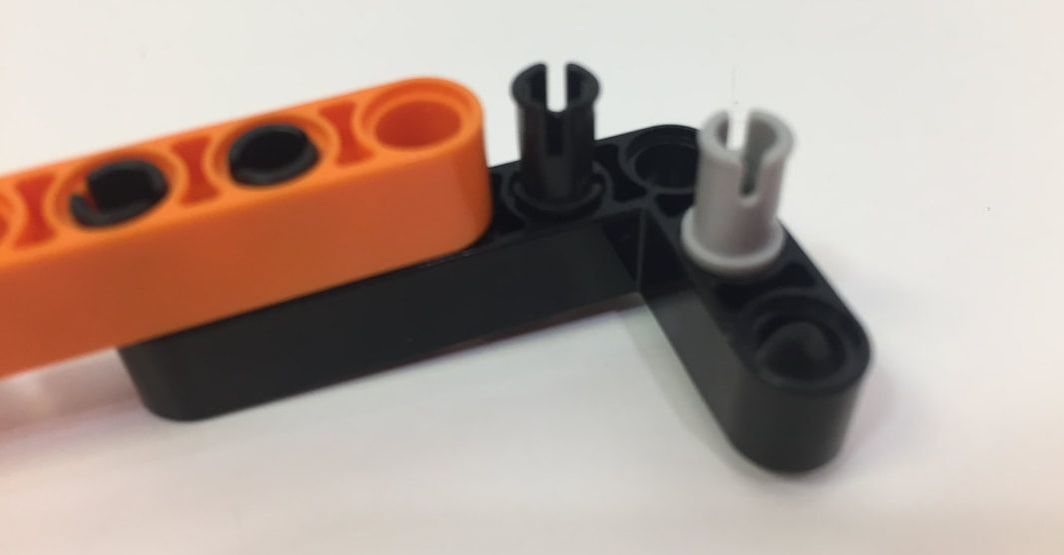
Attach the black pin, and the grey frictionless pin, and then flip it back over
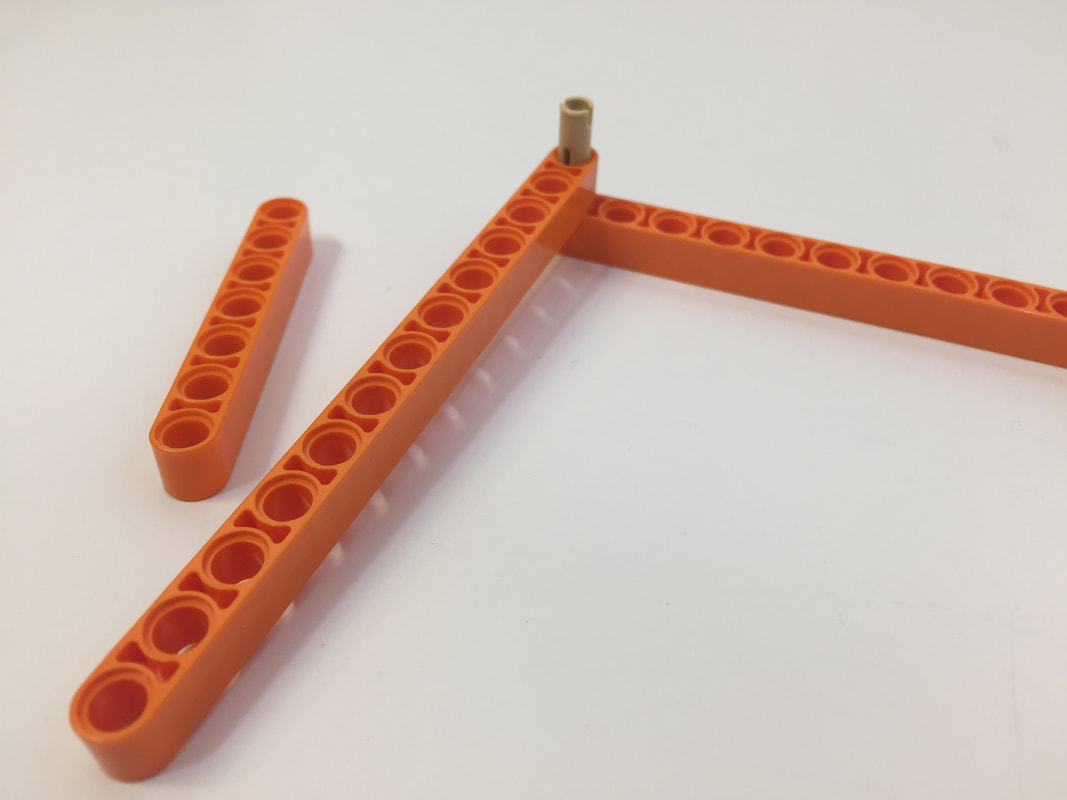

Build 8 of the above legs.
Strider's mechanism requires two legs to be linked in front/back pairs. In the following steps the cranks are built, a pair of legs is added to the axle, and then the legs are linked.
Strider's mechanism requires two legs to be linked in front/back pairs. In the following steps the cranks are built, a pair of legs is added to the axle, and then the legs are linked.
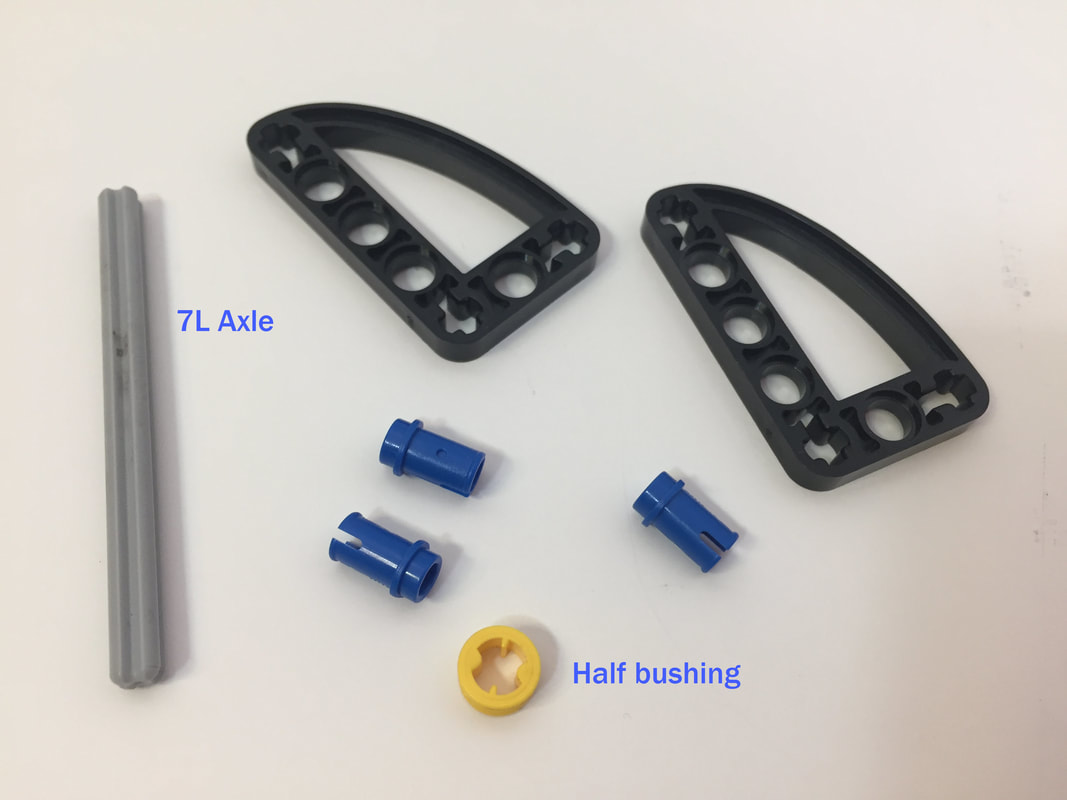
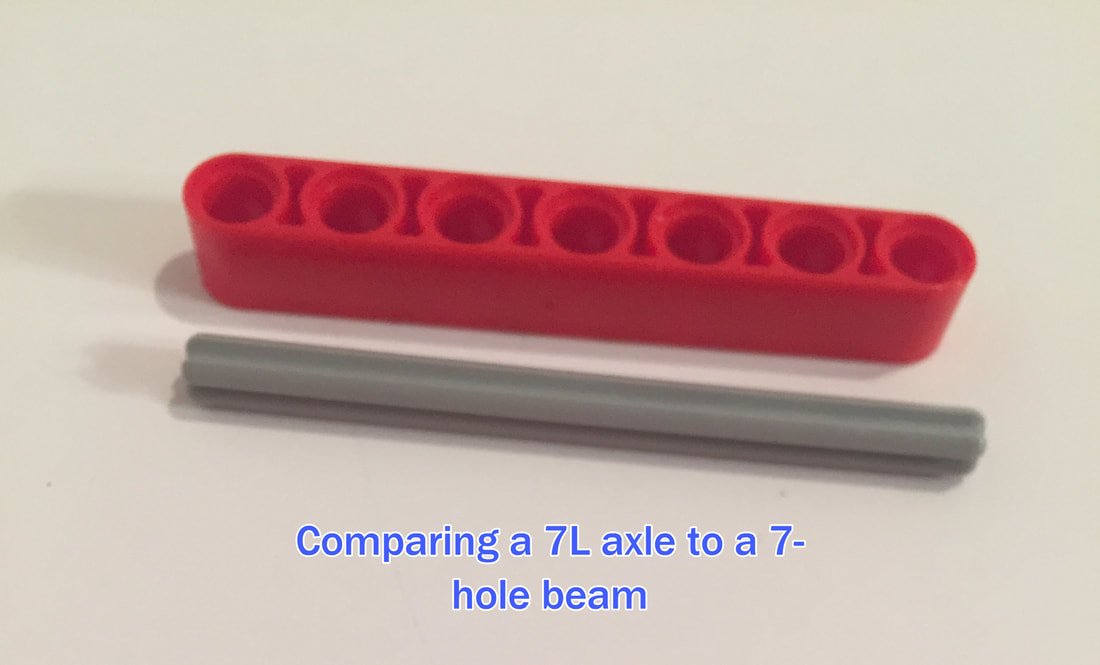
The parts required for a crank + axle
|
If you aren't sure which of your axles is a 7L axle, as pictured above, then simply compare it to a beam with 7 holes, as shown to the right. |
|

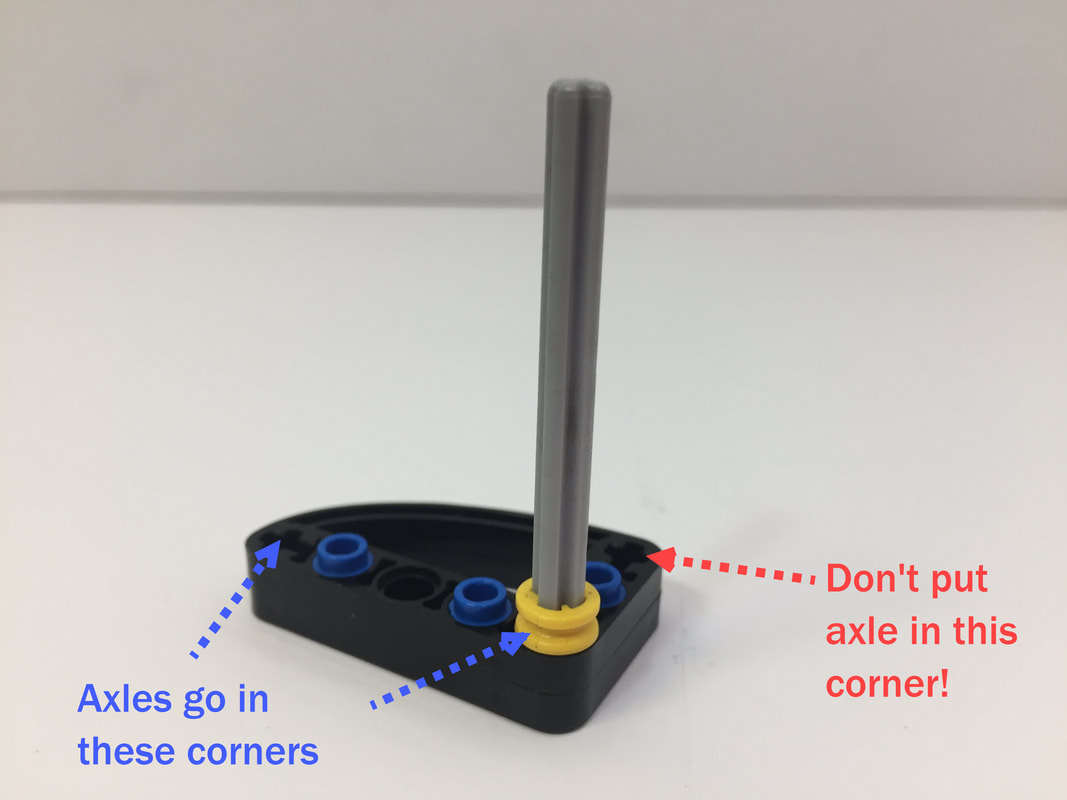
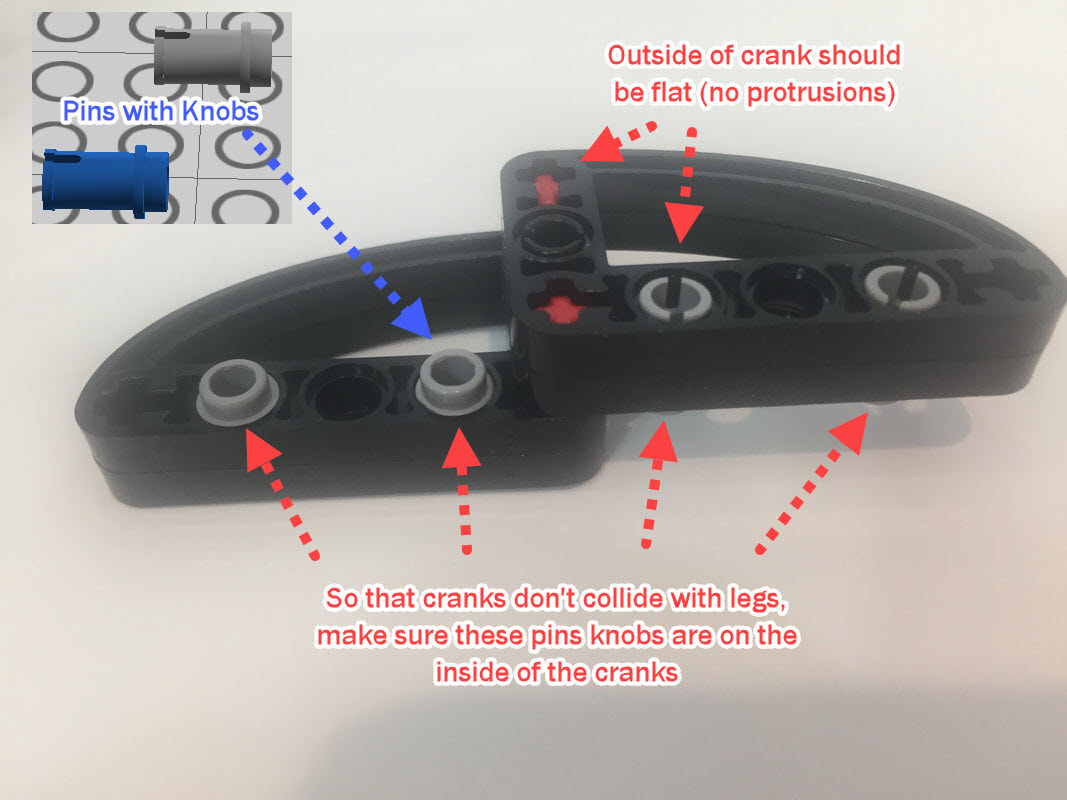
Connect two 3X5 ellipse parts with the 1 1/2 L blue pins
Next, build the front/back leg pairs as shown below. You'll need to make 4 of the leg pairs.
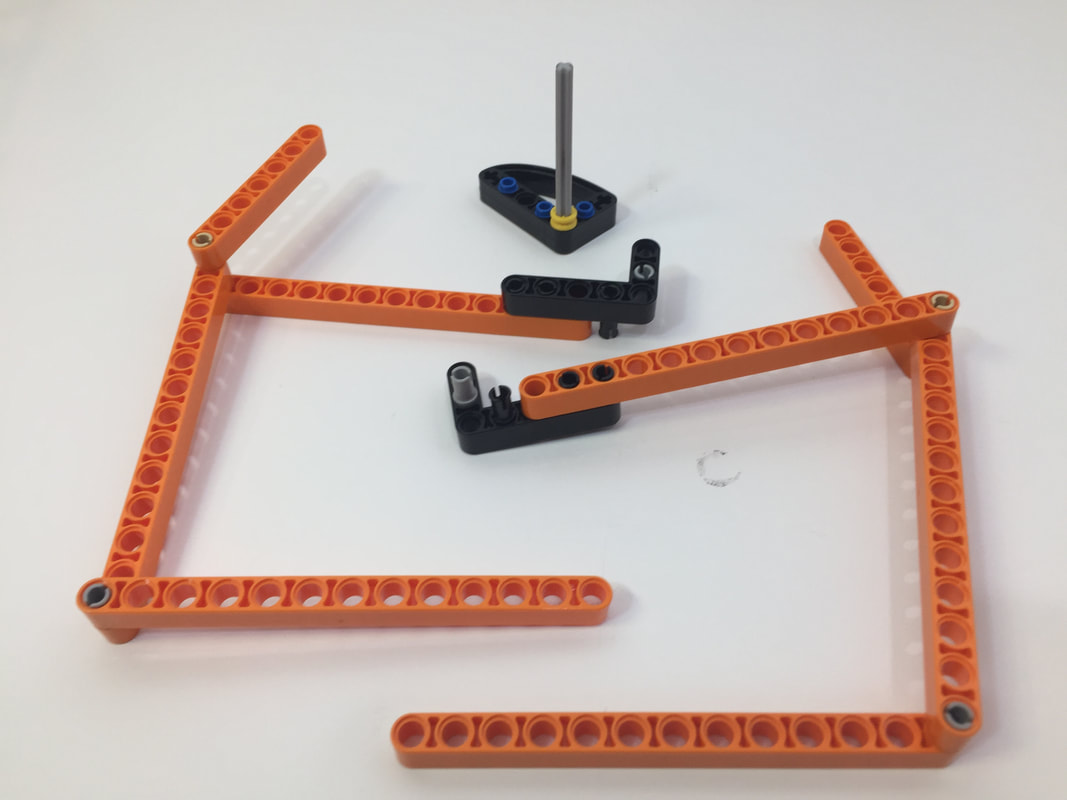
Linking a pair of legs
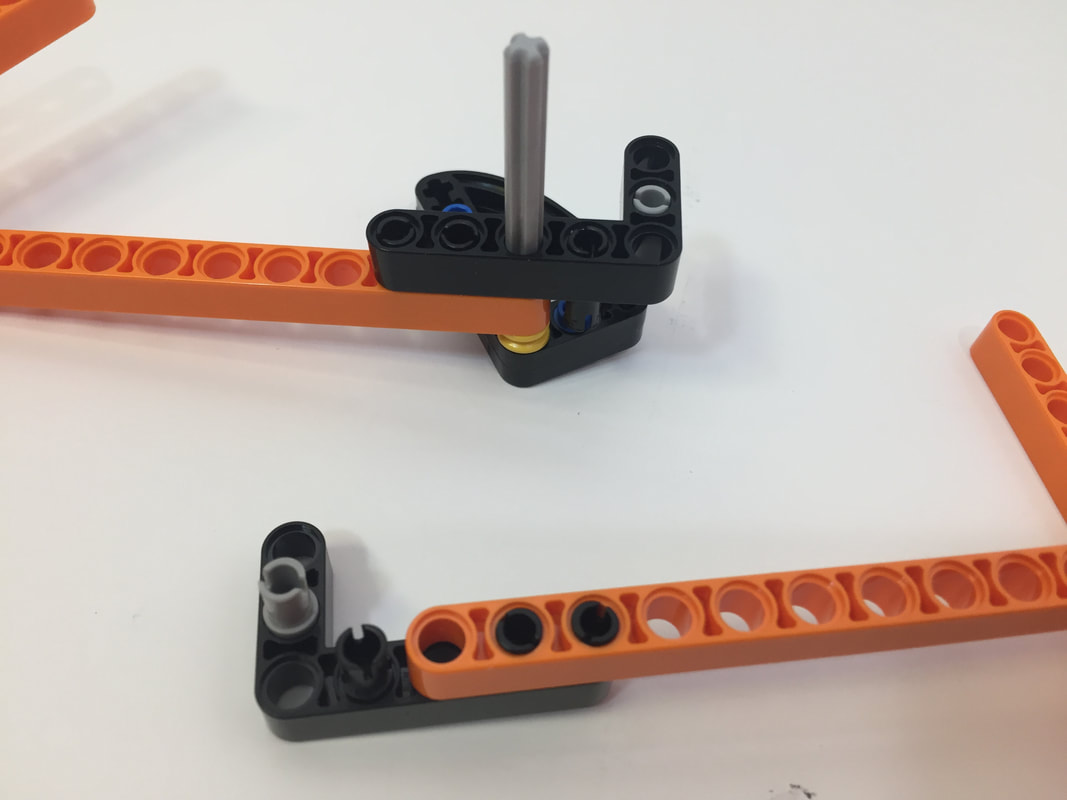
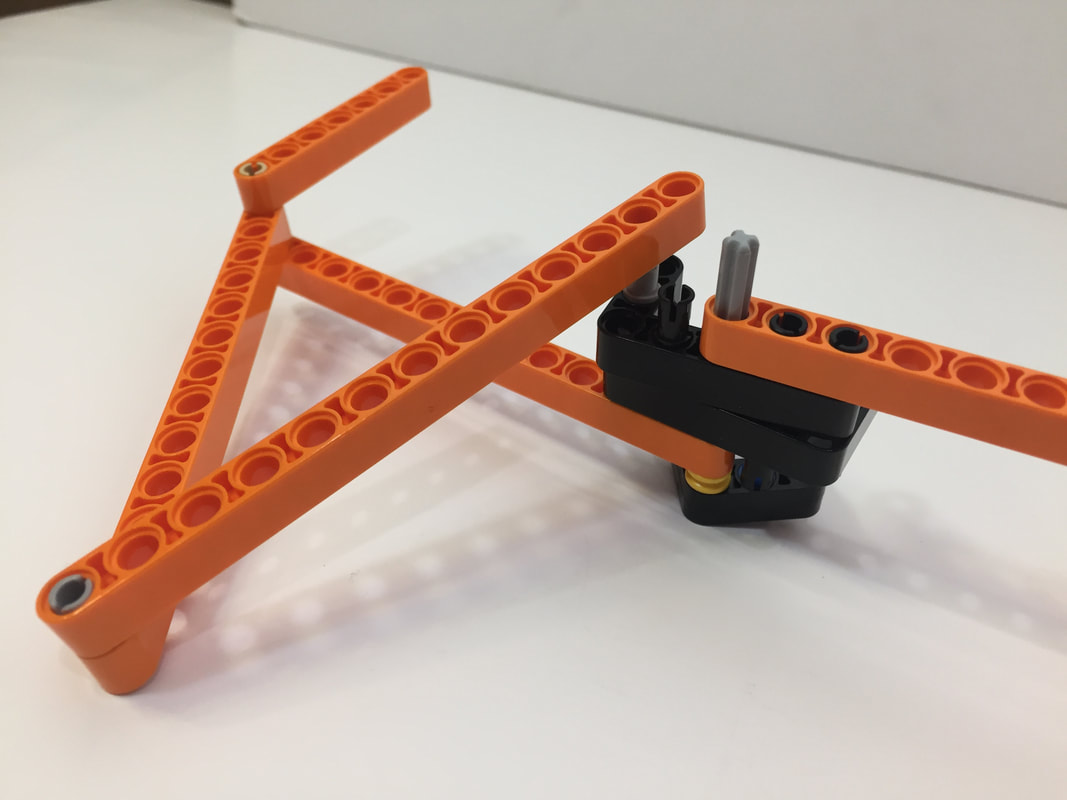
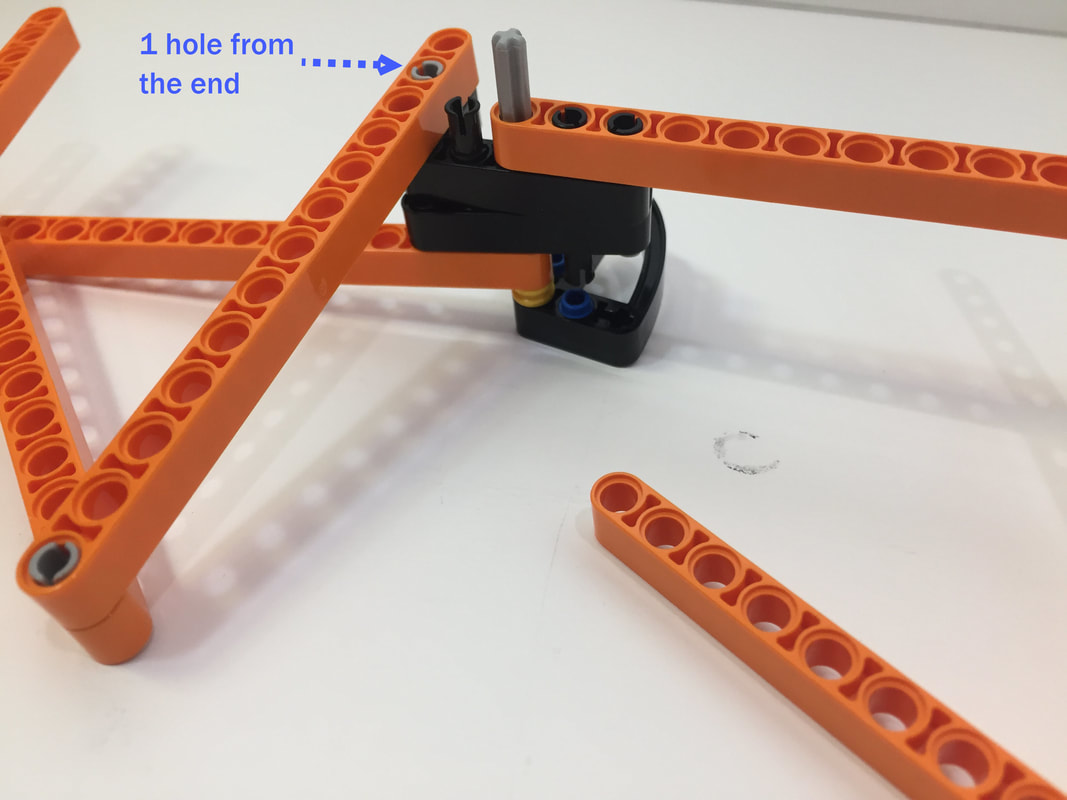
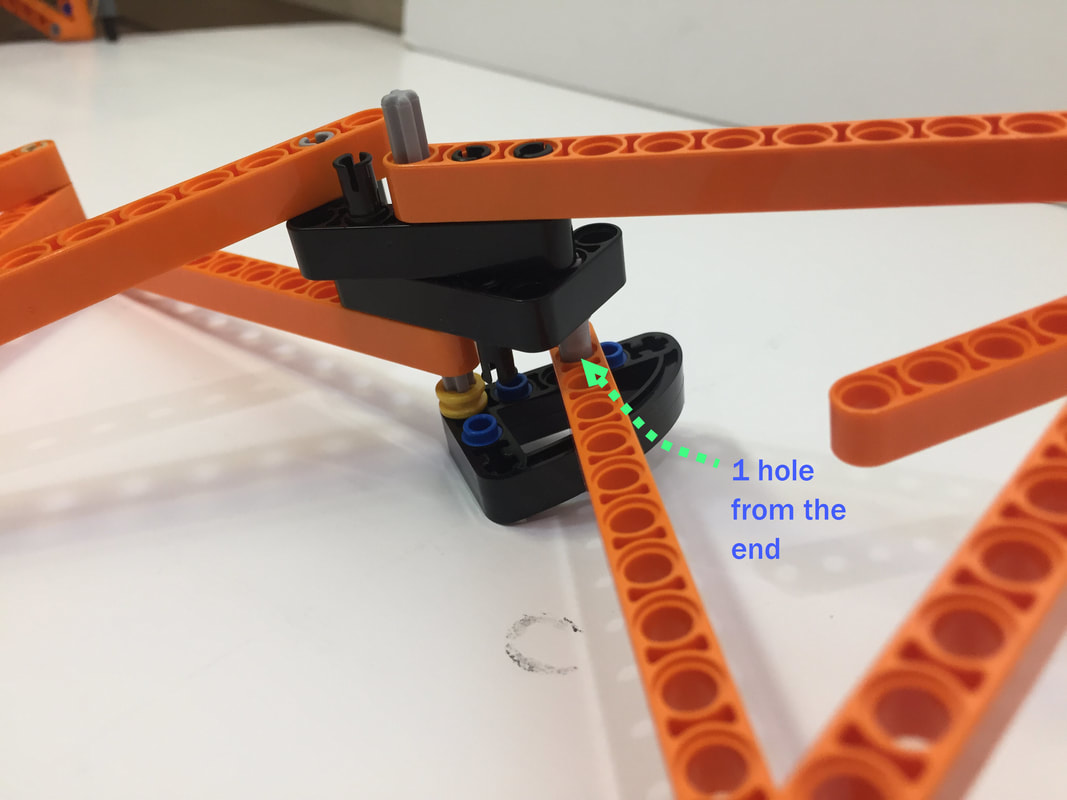
Attach the right leg like the left, one hole from the end
Add a 1/2 bushing
Make 4 of the above leg pairs.
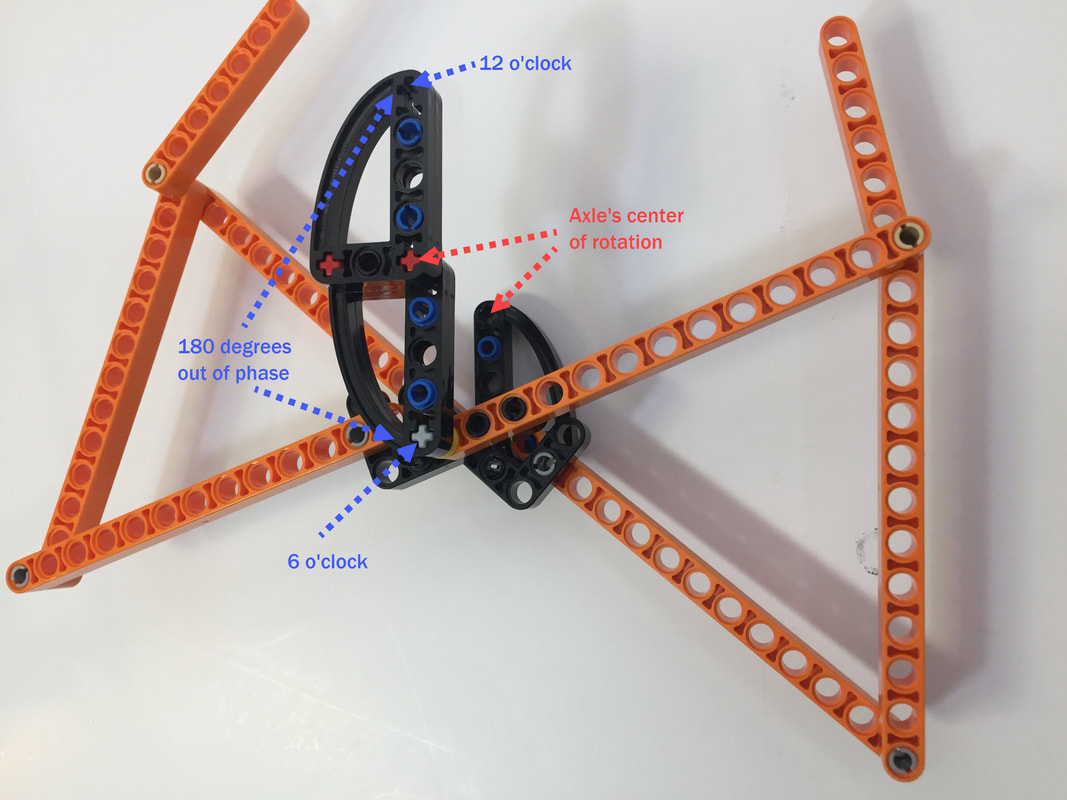
Below shows how to build the double-length crank, so that the outer leg pairs are 180 degrees out of phase of the inner leg pairs.
Below shows how to build the double-length crank, so that the outer leg pairs are 180 degrees out of phase of the inner leg pairs.



Make sure you build the double axle as pictured above, not below
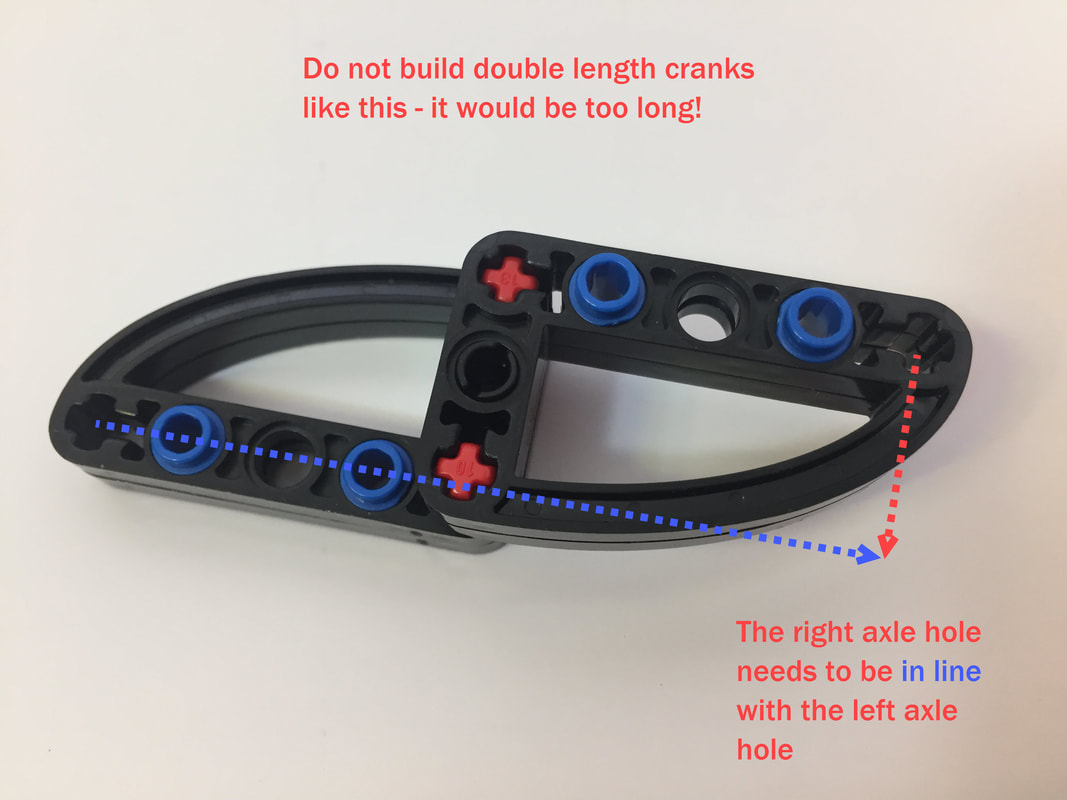

Make sure the double length crank is parallel to the single length crank!