|
As you can see in the following images, Klann's foot-speed slows down significantly at each corner of its foot-path: 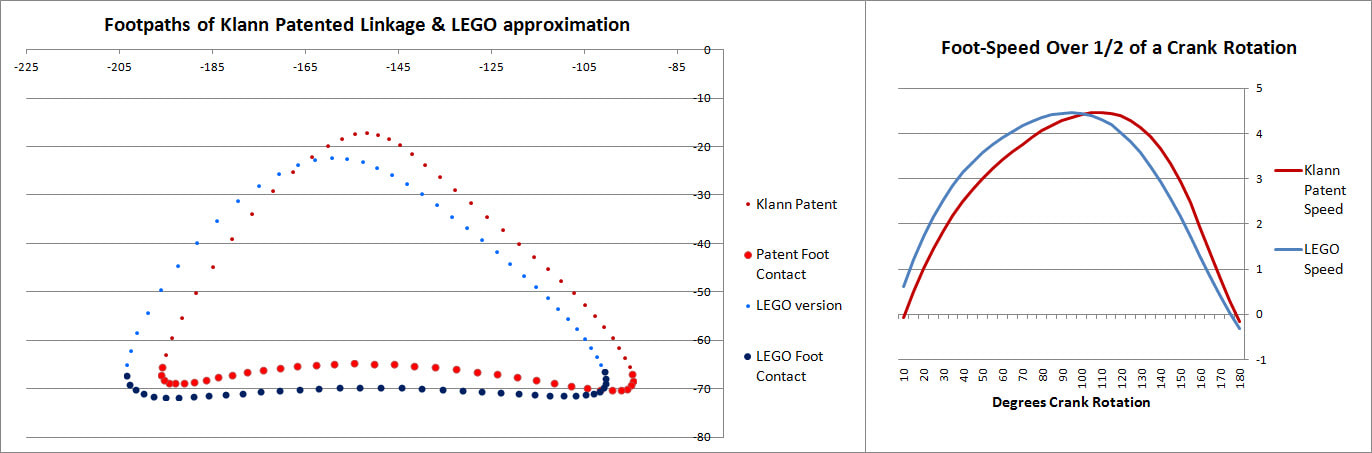
This causes robots using the Klann linkage to have a halting gait, which can be a problem on higher-friction terrain at higher speeds. One solution is to add feet that passively rotate as Klann's speed varies, like Strandbeest uses.
As demonstrated in the following video, rotating feet also reduce how much the feet drag during turns, since the inner and outer feet can rotate at different speeds and function somewhat like a differential. In case you were wondering, Klann's violent shaking on the carpeting did cause it to flip over a few times, but at least it didn't do this.
Rotating feet also improve performance on rugged terrain, since the feet are less likely to catch on obstacles. Prior to adding wheels to the feet, the Klann below couldn't take one step on those air filters without the feet catching and jamming the linkage, and if LEGO's XL motors had been used, jamming the linkage could have broken the gears. 
Rotating Feet Help Klann Linkage Robots to Walk on Rugged Terrain, but eventually foot rotation can't make up for Klann's triangular foot-path....like when it encounters big changes in the terrain's slope
Strandbeest Strandbeest's foot-speed also slows at each corner of its foot-path, but less so than Klann's: 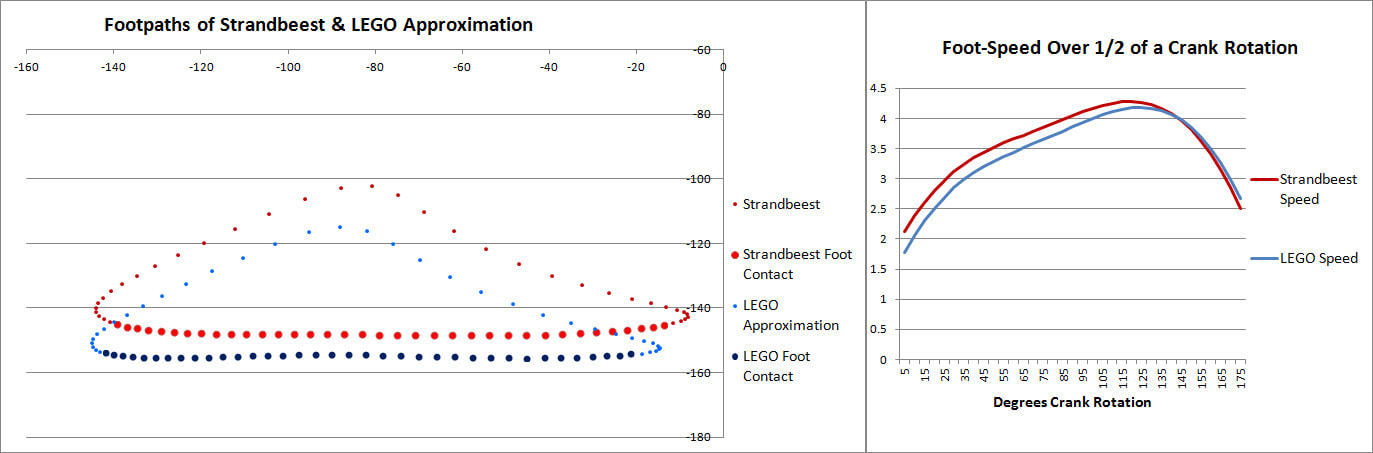
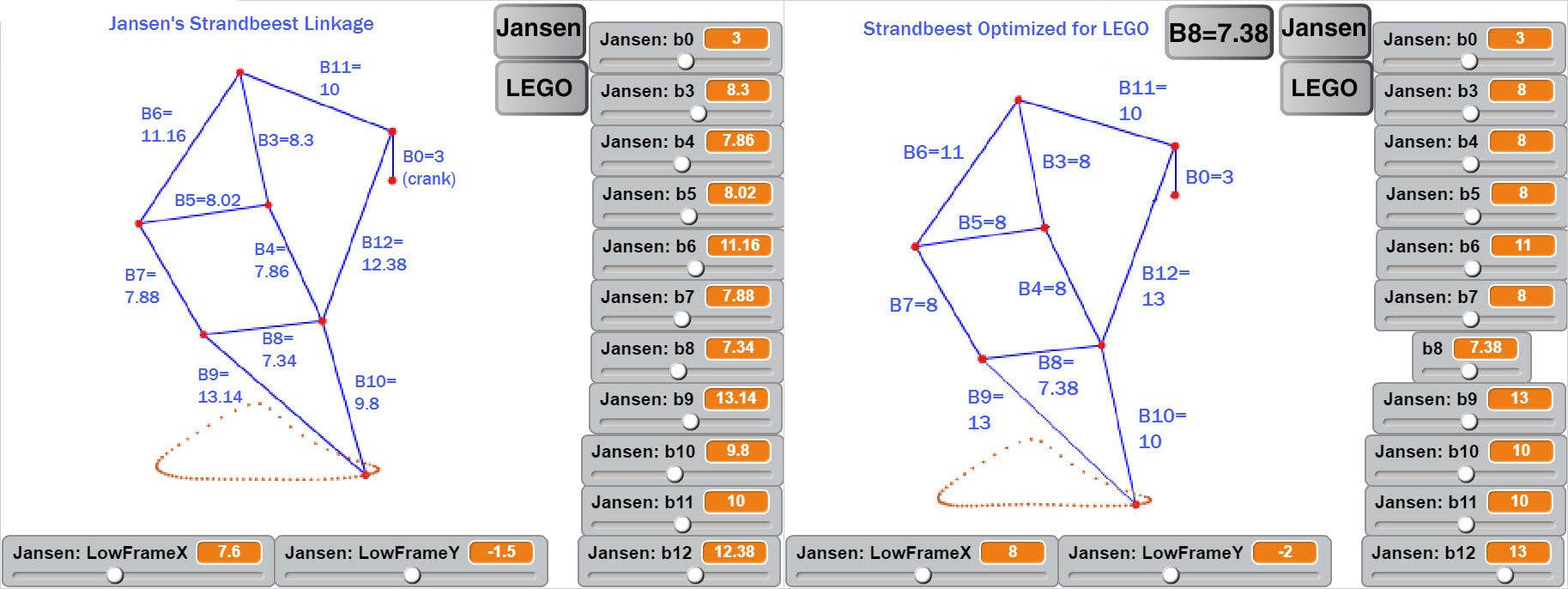
This may be part of the reason that Theo added feet that passively rotate to Strandbeest? ( Jeez that thing is cool!) 
Similar to Klann robots, adding rotating feet to LEGO Strandbeests smooths their speed:
As can be seen in the following simulation of one side of an 8-legged Strandbeest, the variation in Strandbeest's foot-speed is exaggerated when built with only 8 legs since the foot transition occurs when the feet are already lifted off the ground:
3 Comments
|
Categories
All
Archives
February 2023
|
 RSS Feed
RSS Feed