|
I've been thinking about creating an EV3 Strider Ver 2, but to handle the increased weight and width Strider needs to be improved in a few ways, like by increasing the amount of foot-contact it has with the ground.
One way to increase foot-contact is to add four more legs. To check how this would smooth the gait I simulated one side of a 12-legged Strider (Ver 2), and if you watch the video below you'll see Strider bounce whenever the feet touching the ground switch. This bouncing shouldn't be much of a problem at LEGO scale, but it would be at large scale. While a scaled-up Strider's linkage could be optimized for a smoother gait, it can also be smoothed by adding feet that are shaped to offset the gait's bumpiness. As an example, in the second half of the video I added small triangular feet to the front legs, which act like heels and toes. These feet reduce the gait's bumpiness by about 1/3rd. However, the toes are more likely to catch on obstacles, which can cause the linkage to lock and gears to grind. UPDATE: in 2018 we re-optimized Strider's linkage again, and published a half dozen new variations who's gaits can be smoothed by adding toes like those added to Strider Ver 3 below: 
Strider Ver 3 with a Rolling Heel-Toe Gait
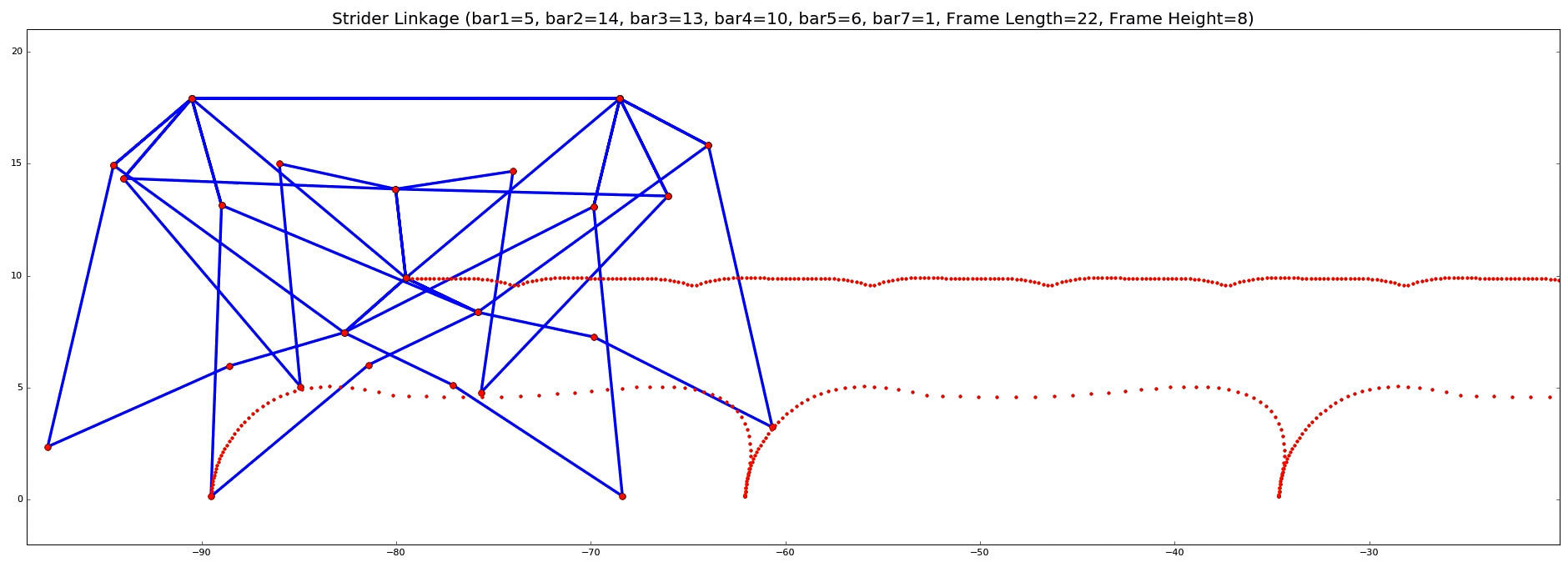
Strider Ver 3 without Toes - the Red Center Line Shows the Bump in the Gait at Foot Transitions
Below is Strider Ver 3 in a LEGO prototype with the above simulated toes of length 2:
And here's the same Strider linkage with 8 legs plus longer toes of length 3. Longer toes were used to reduce how far the robot falls at foot transitions when built with only 8 legs: Curved feet Feet with curved bottoms that are shaped to offset the bumpiness of a particular linkage should be even more effective at smoothing gaits - at least when walking on smooth ground. Below is a great example:
And here's another example by Eko Widiatmoko:
2 Comments
Scott Anderson has taken TrotBot to a new level. In addition to using modern Maker tools and gear, Scott reduced TrotBot's width by printing leg parts that link in-line, strengthened the upper leg parts by printing them as bend-resistant triangles, and added those cool hinged feet!
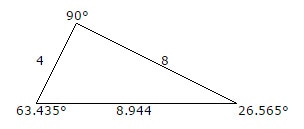
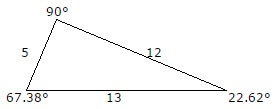
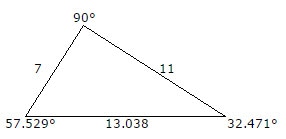
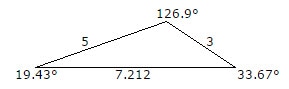
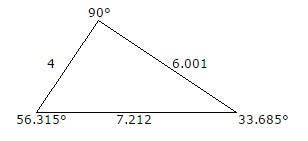
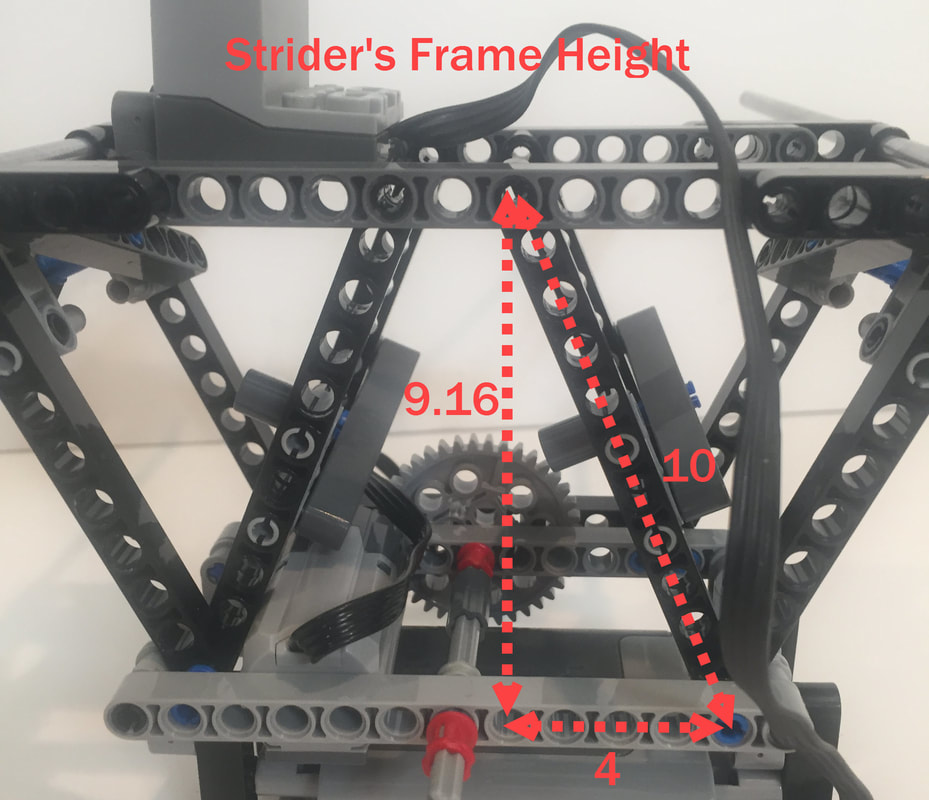
Scott's shares how he created his TrotBot here. I rushed my Klann Ver 2 build and didn't build the outer frames in an optimal way: 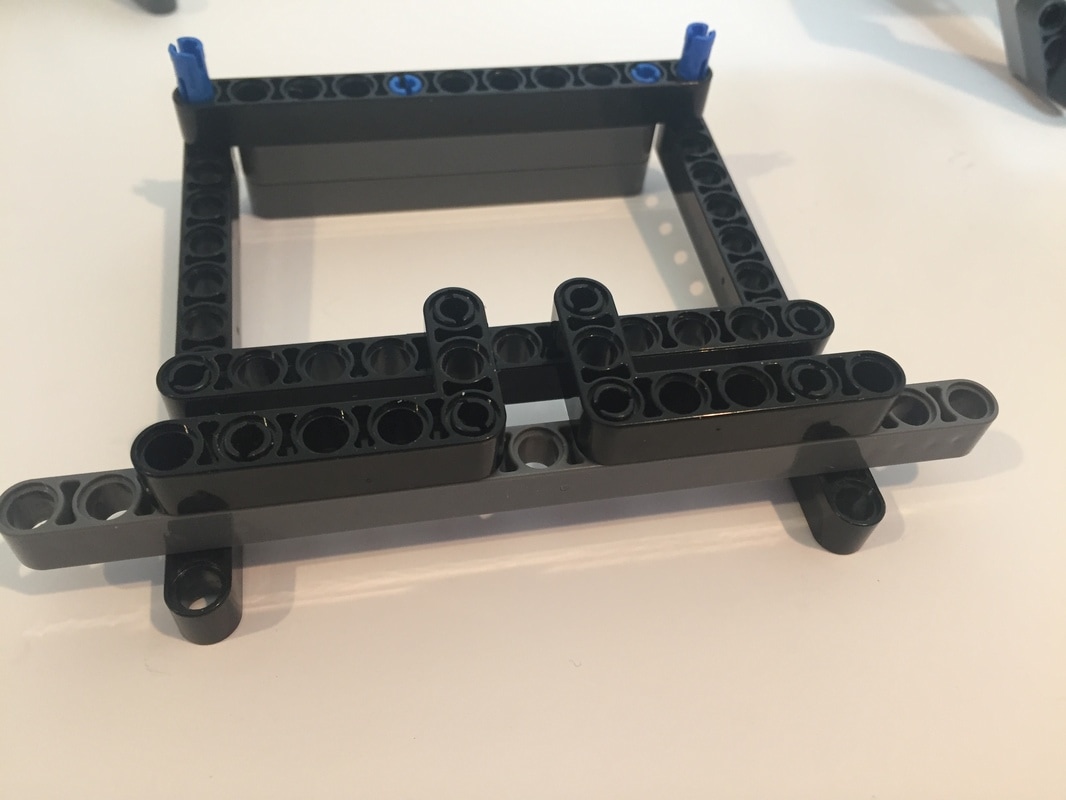 The only thing keeping this frame's corners at right angles are the two 3x5 L-shaped LEGO parts. If this frame were put under a lot of force, like would happen at a larger scale, the corners would be subjected to torque that could easily cause the rectangle to collapse. To avoid this diagonals need to be added, which will convert the rectangles into triangles and lock the corner's angles. The challenge with walkers in LEGO is we often need diagonals for rectangles that define the linkage's parameters. In other words, these diagonals often need to be the hypotenuses of right triangles. As you can see below, my Klann's upper support rods are 7 holes above the motor's axle, and the lower support rods are 2 holes below the motor's axle. Neither of these lengths work with a 3-4-5 or 6-8-10 right triangle with LEGO parts for hypotenuses. What can we do using the integer lengths of LEGO's beams?  NOTE: When determining the length of LEGO beams the first hole is always counted as 0! If you don't measure LEGO beam lengths in this way you won't be able to use the Pythagorean theorem to calculate which beams to use as hypotenuses. Fortunately, with LEGO we don't have to be at precise integer numbers, and we can use hypotenuses that are "close enough". 1. Hypotenuses for rectangles of height 7. Plugging in a 90 degree angle with a side length of 7, plus a few other whole number sides into the Pythagorean theorem yields this near integer number triangle: 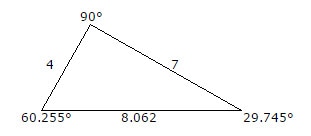 I used this triangle for Klann's inner frame where two 9 hole beams create hypotenuses of length 8: 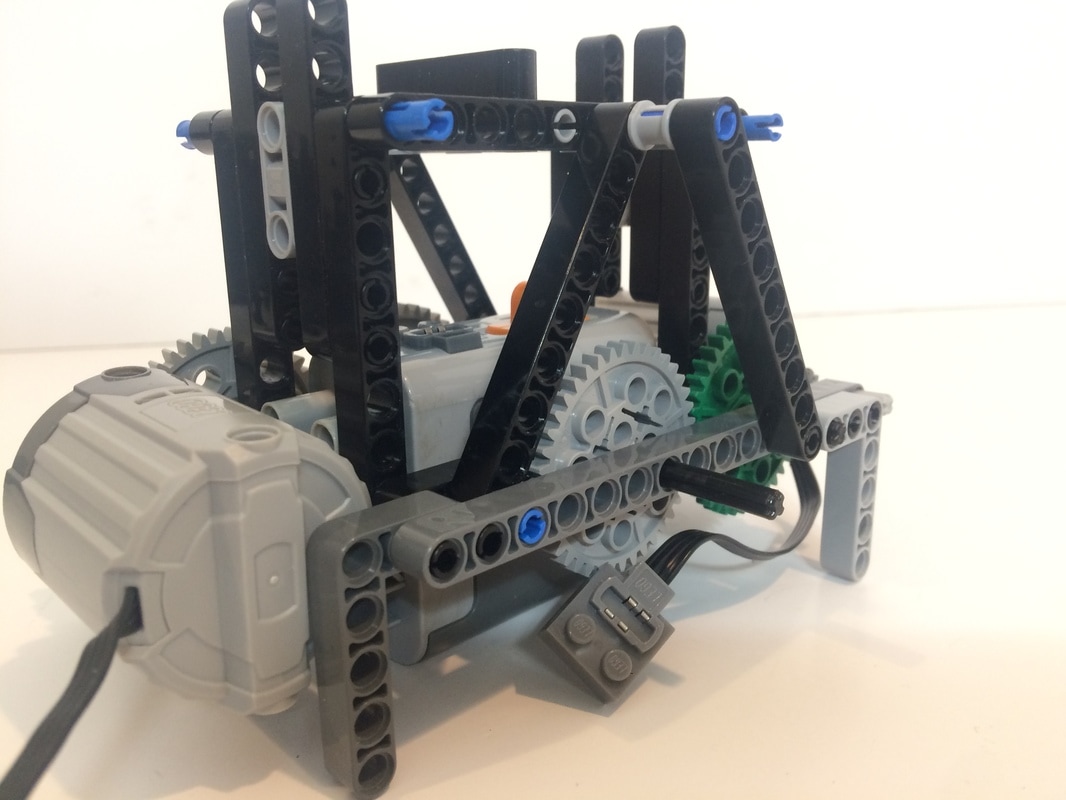 I also used this.triangle for TrotBot's frame:  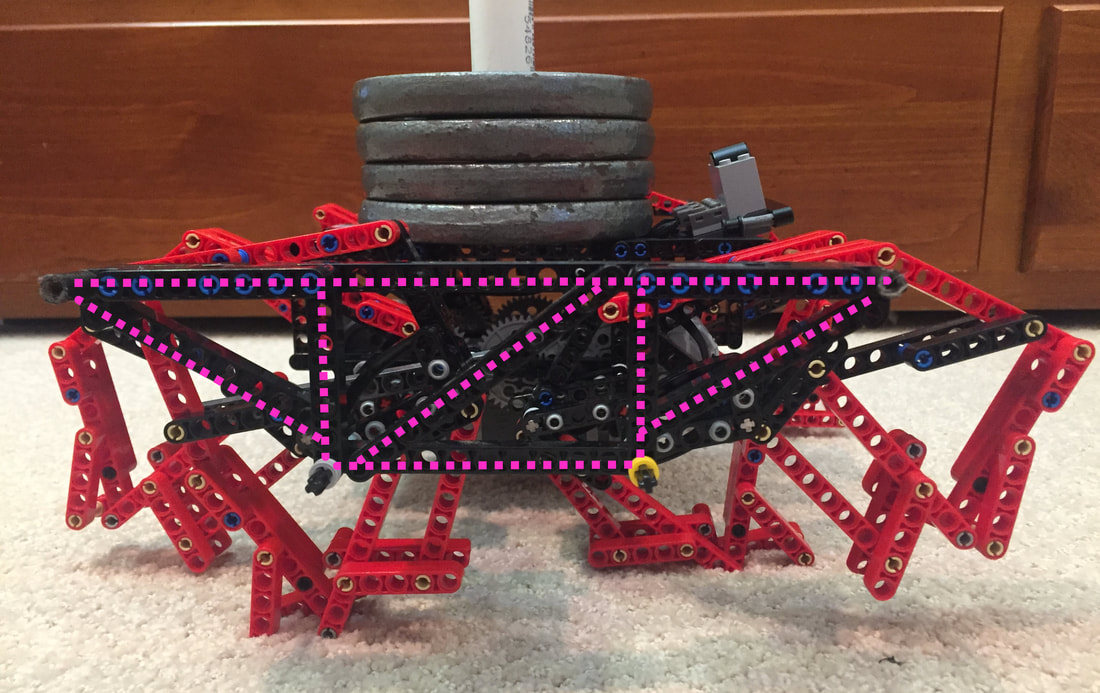 Triangles convert bending forces to tension and compression, which even plastic LEGO parts can handle well 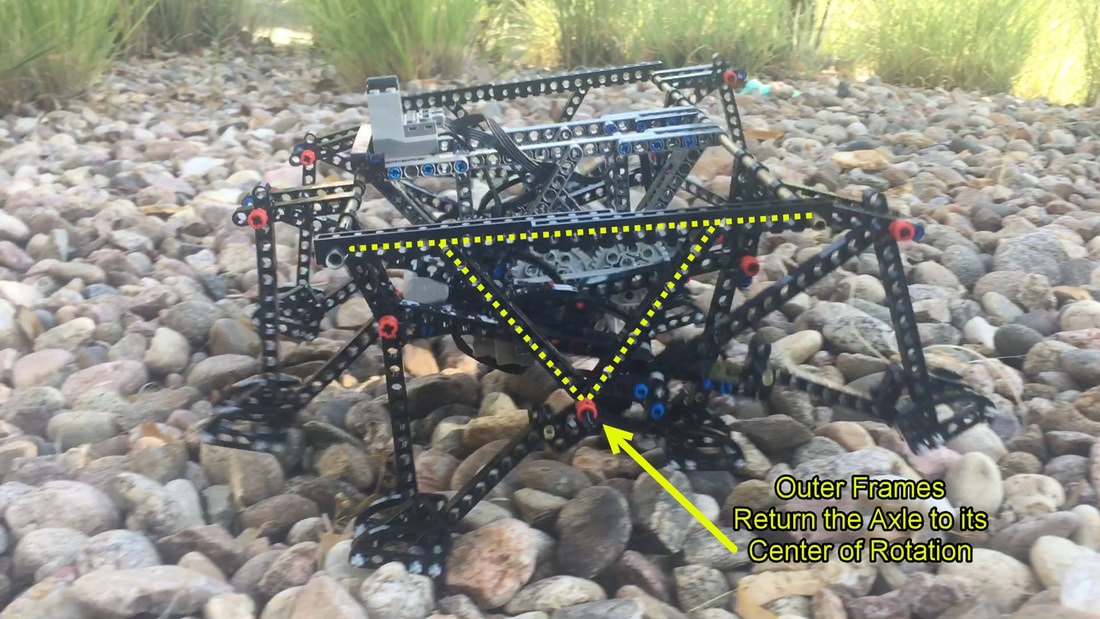 Strider's Outer Frame's Triangle 2. Hypotenuses for rectangles of height 9. We can also connect the top and bottom beams of Klann's frame with a hypotenuse: 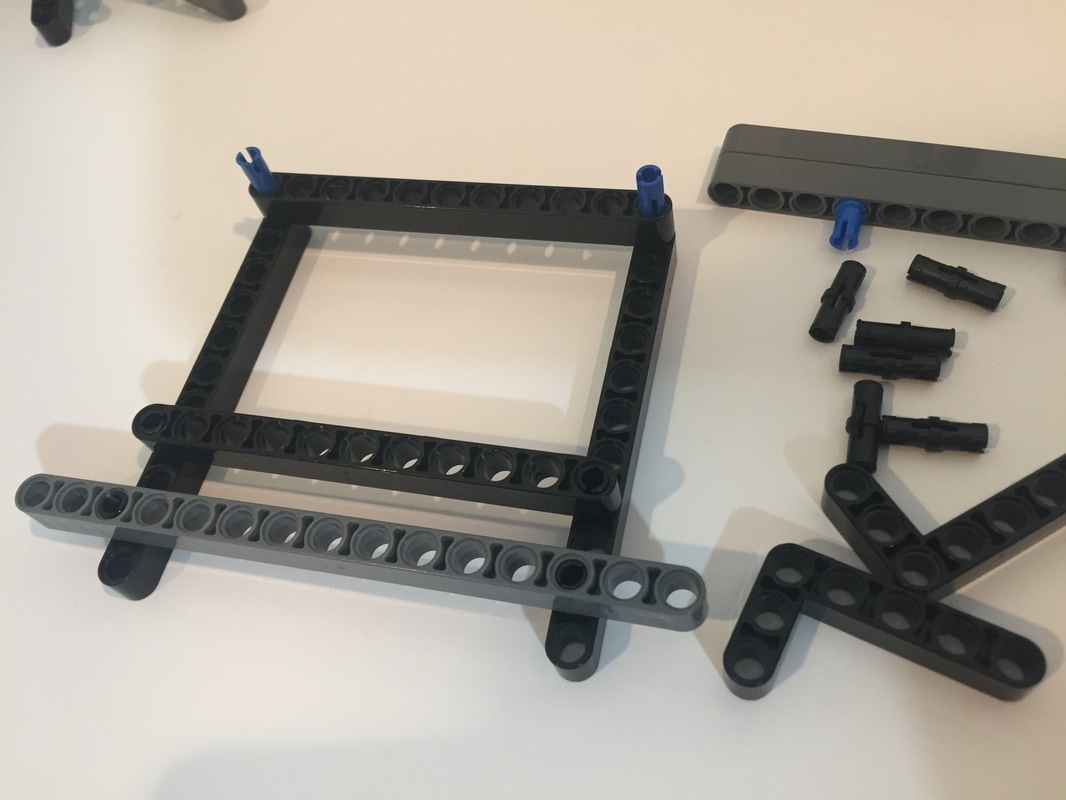 Plugging a 90 degree angle with a side length of 9, plus a few other whole number sides into the Pythagorean theorem yields another near integer number triangle: 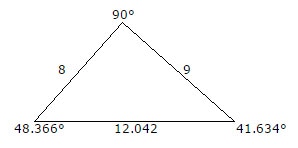 So, 13 hole LEGO beams can be used to lock Klann's outer frames into triangles, like this: 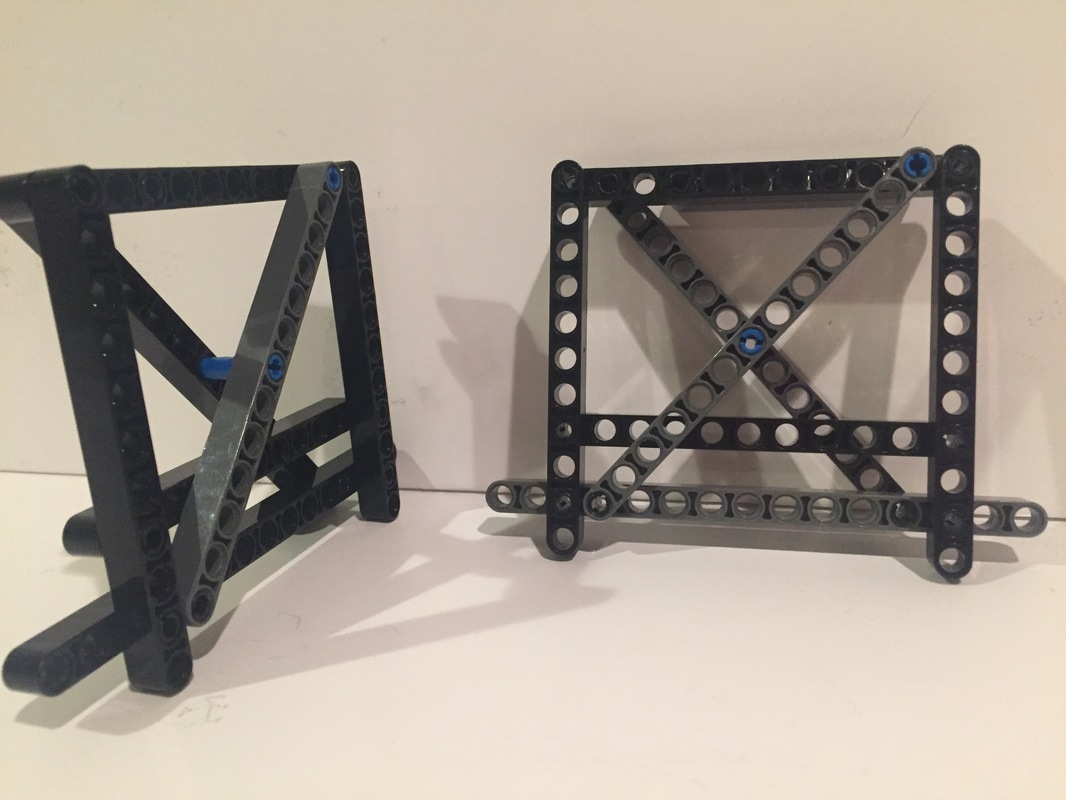 Here are a few other useful triangles for LEGO frames:
 Also, the below 5-3 bent beam can be used as a hypotenuse. 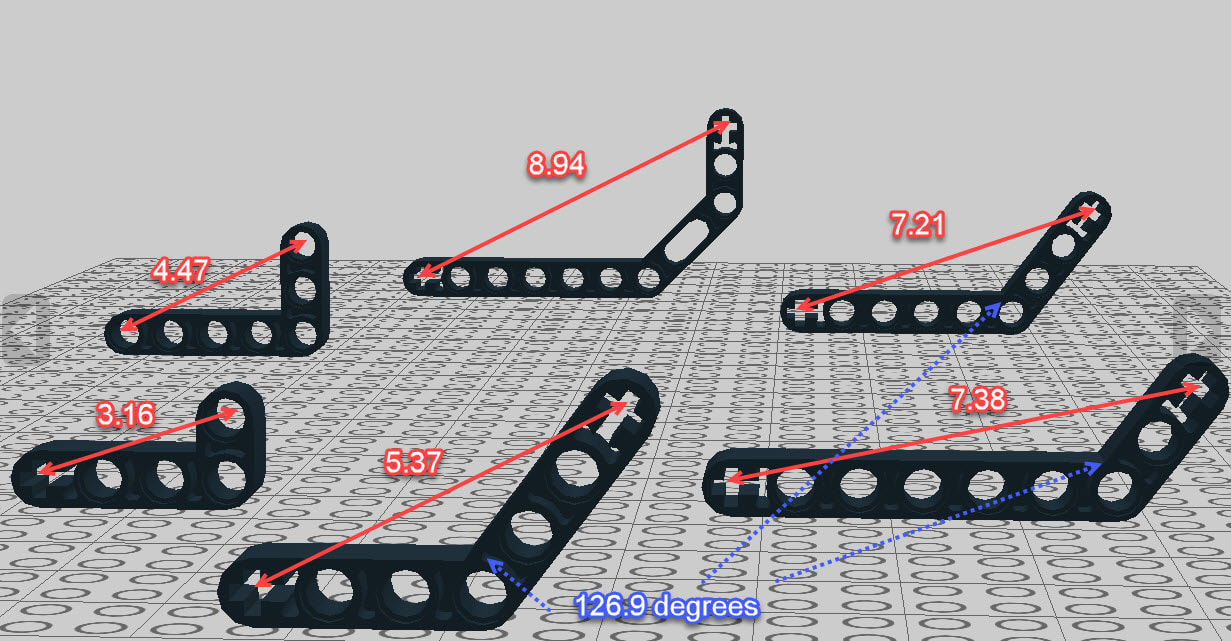
You can create more triangles by lengthening a side of the above parts by attaching a LEGO beam to it.
 LEGO beam lengths for creating frames of varying heights |
Categories
All
Archives
February 2023
|
 RSS Feed
RSS Feed