|
I've been thinking about creating an EV3 Strider Ver 2, but to handle the increased weight and width Strider needs to be improved in a few ways, like by increasing the amount of foot-contact it has with the ground.
One way to increase foot-contact is to add four more legs. To check how this would smooth the gait I simulated one side of a 12-legged Strider (Ver 2), and if you watch the video below you'll see Strider bounce whenever the feet touching the ground switch. This bouncing shouldn't be much of a problem at LEGO scale, but it would be at large scale. While a scaled-up Strider's linkage could be optimized for a smoother gait, it can also be smoothed by adding feet that are shaped to offset the gait's bumpiness. As an example, in the second half of the video I added small triangular feet to the front legs, which act like heels and toes. These feet reduce the gait's bumpiness by about 1/3rd. However, the toes are more likely to catch on obstacles, which can cause the linkage to lock and gears to grind. UPDATE: in 2018 we re-optimized Strider's linkage again, and published a half dozen new variations who's gaits can be smoothed by adding toes like those added to Strider Ver 3 below: 
Strider Ver 3 with a Rolling Heel-Toe Gait
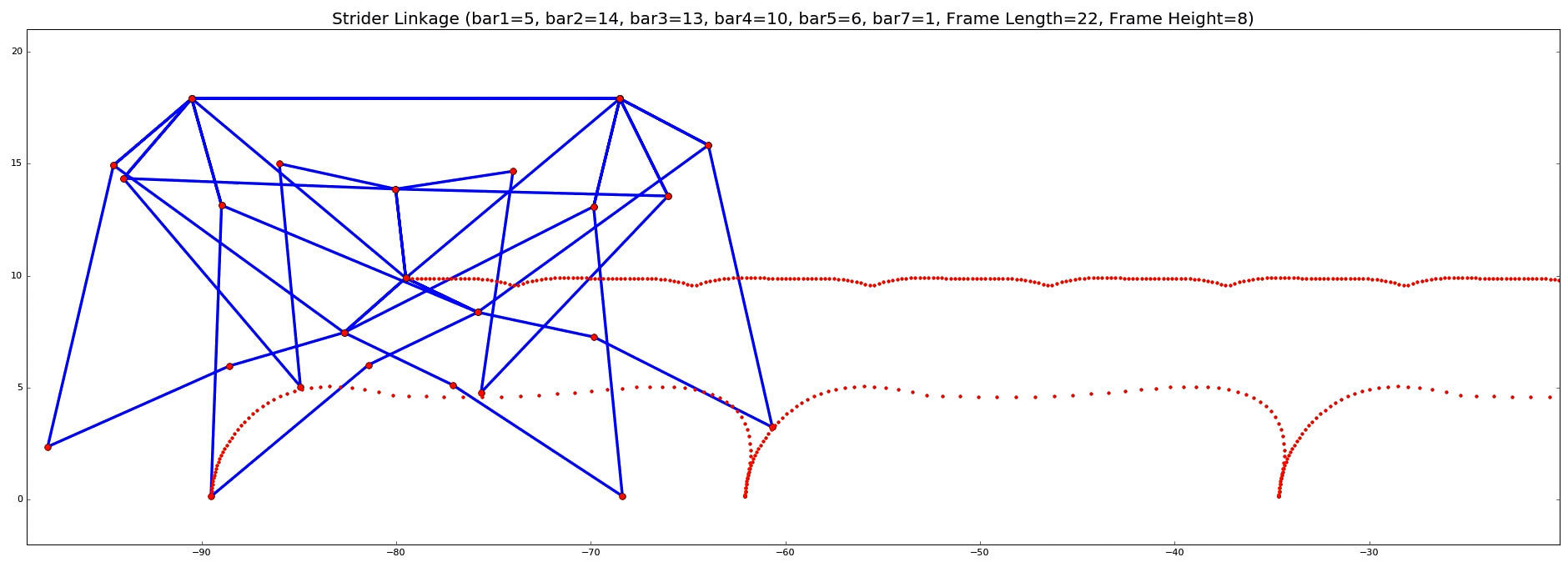
Strider Ver 3 without Toes - the Red Center Line Shows the Bump in the Gait at Foot Transitions
Below is Strider Ver 3 in a LEGO prototype with the above simulated toes of length 2:
And here's the same Strider linkage with 8 legs plus longer toes of length 3. Longer toes were used to reduce how far the robot falls at foot transitions when built with only 8 legs: Curved feet Feet with curved bottoms that are shaped to offset the bumpiness of a particular linkage should be even more effective at smoothing gaits - at least when walking on smooth ground. Below is a great example:
And here's another example by Eko Widiatmoko:
2 Comments
John
5/2/2017 09:20:22 pm
What software are you using to simulate this?
Ben
5/3/2017 11:02:08 pm
Hi John, Leave a Reply. |
Categories
All
Archives
February 2023
|
 RSS Feed
RSS Feed