|
TrotBots with 8 legs balance by having 4 feet in contact with the ground, one at each corner of the robot. If one of these feet were removed, then TrotBot would tip, similar to what would happen if you took one wheel off of a car. For a tripod gait to be balanced, the feet need to be arranged like an equilateral triangle, so we removed the two outer pairs of legs, and added a pair of legs to the center of TrotBot, inside the frame:  Also, we needed to adjust the timing of TrotBot's front and rear feet. As shown in the image below, hexapod robots with tripod gaits transition from one tripod to another as they walk, which requires TrotBot's front and rear feet to be 180 degrees out of phase: 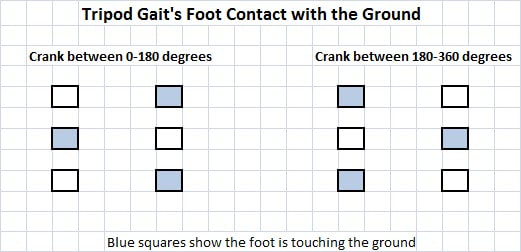 However, orienting TrotBot's front and rear cranks 180 degrees out of phase won't put the feet 180 degrees out of phase, because the location of the two leg's upper frame connections relative to the cranks is in the opposite direction. Looking from the side of the robot, the left leg's upper frame connection is 49.4 degrees to the left, and the right leg's is 49.4 degrees to the right. Here's a diagram of the left leg's frame connection relative to the crank: 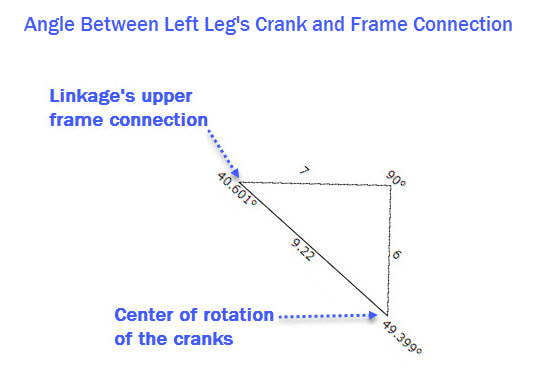 So, in order to have the left and right feet touching the ground at the same time the right crank would need to be rotated clockwise by 49.4 degrees x 2, or 98.8 degrees. For the foot contact to be 180 degrees out of phase, the right crank would need to be rotated a further 180 degrees, or 278.8 degrees in total, as shown in the image below. 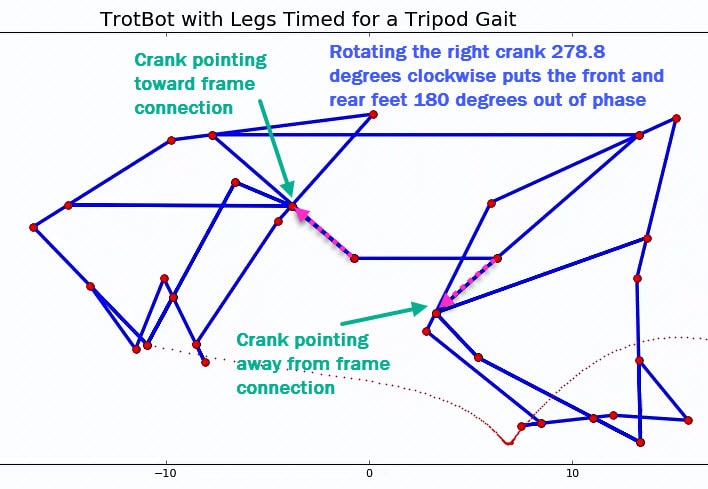 In other words, the front and rear cranks should be about 80 degrees out of phase  Hexapod TrotBot with a Tripod Gait Here's a simulation of TrotBot's legs with this 278.8 degree phase shift of the right crank:  TrotBot with Legs Timed for a Tripod Gait
0 Comments
|
Categories
All
Archives
February 2023
|
 RSS Feed
RSS Feed