|
As you can see in the following images, Klann's foot-speed slows down significantly at each corner of its foot-path: 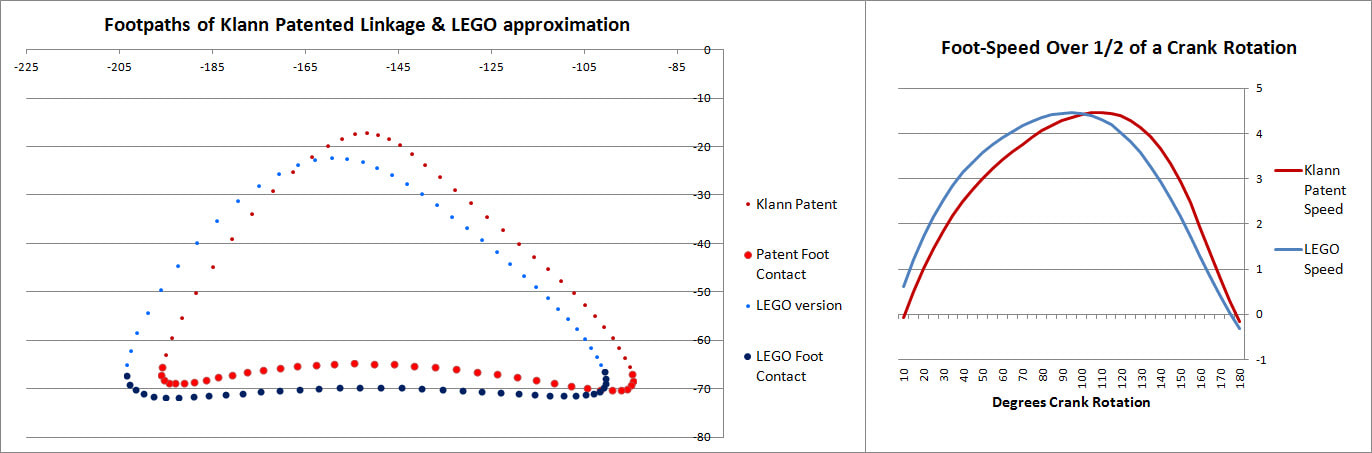
This causes robots using the Klann linkage to have a halting gait, which can be a problem on higher-friction terrain at higher speeds. One solution is to add feet that passively rotate as Klann's speed varies, like Strandbeest uses.
As demonstrated in the following video, rotating feet also reduce how much the feet drag during turns, since the inner and outer feet can rotate at different speeds and function somewhat like a differential. In case you were wondering, Klann's violent shaking on the carpeting did cause it to flip over a few times, but at least it didn't do this.
Rotating feet also improve performance on rugged terrain, since the feet are less likely to catch on obstacles. Prior to adding wheels to the feet, the Klann below couldn't take one step on those air filters without the feet catching and jamming the linkage, and if LEGO's XL motors had been used, jamming the linkage could have broken the gears. 
Rotating Feet Help Klann Linkage Robots to Walk on Rugged Terrain, but eventually foot rotation can't make up for Klann's triangular foot-path....like when it encounters big changes in the terrain's slope
Strandbeest Strandbeest's foot-speed also slows at each corner of its foot-path, but less so than Klann's: 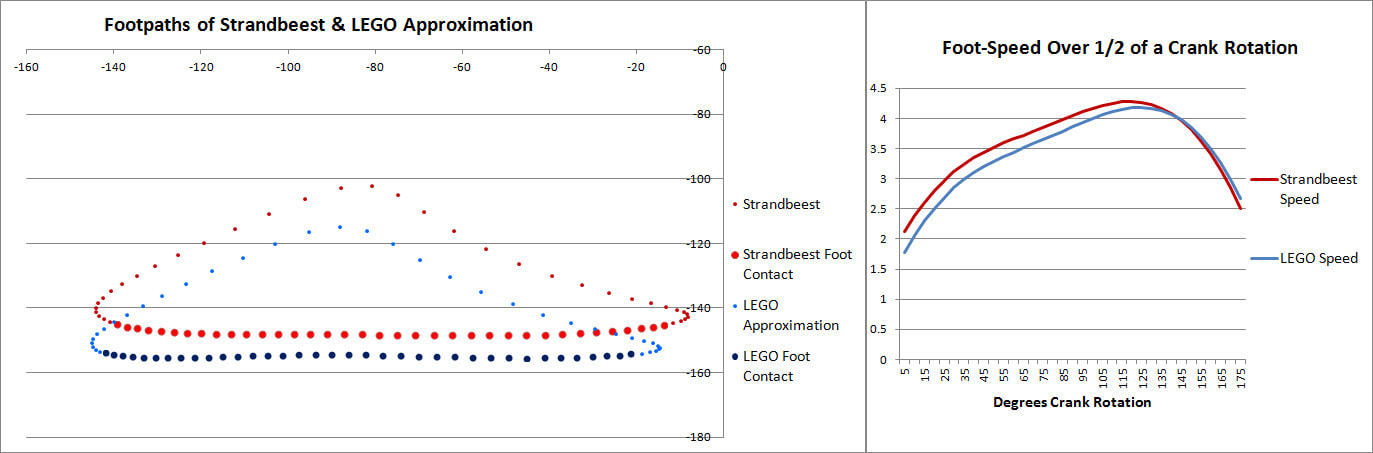
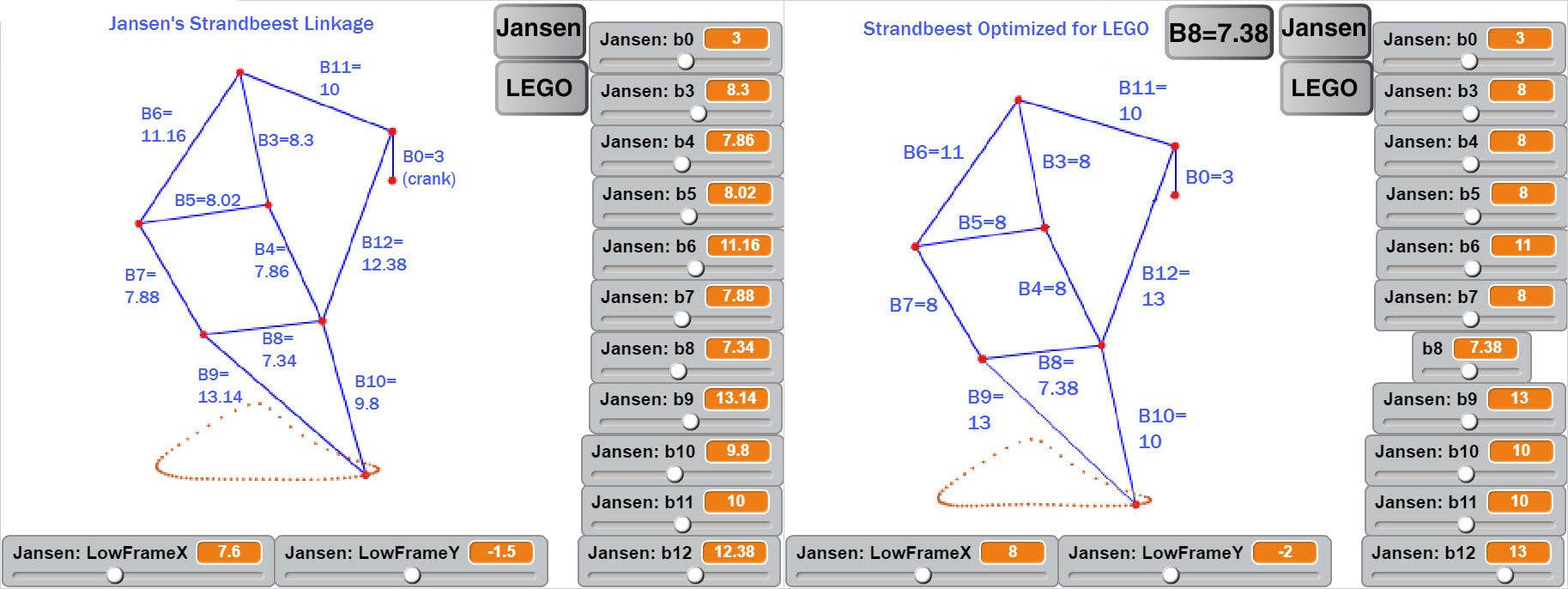
This may be part of the reason that Theo added feet that passively rotate to Strandbeest? ( Jeez that thing is cool!) 
Similar to Klann robots, adding rotating feet to LEGO Strandbeests smooths their speed:
As can be seen in the following simulation of one side of an 8-legged Strandbeest, the variation in Strandbeest's foot-speed is exaggerated when built with only 8 legs since the foot transition occurs when the feet are already lifted off the ground:
3 Comments
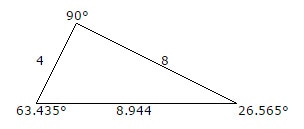
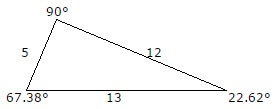
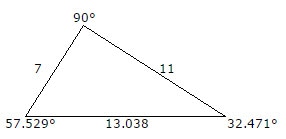
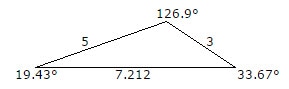
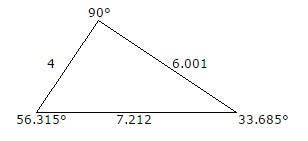
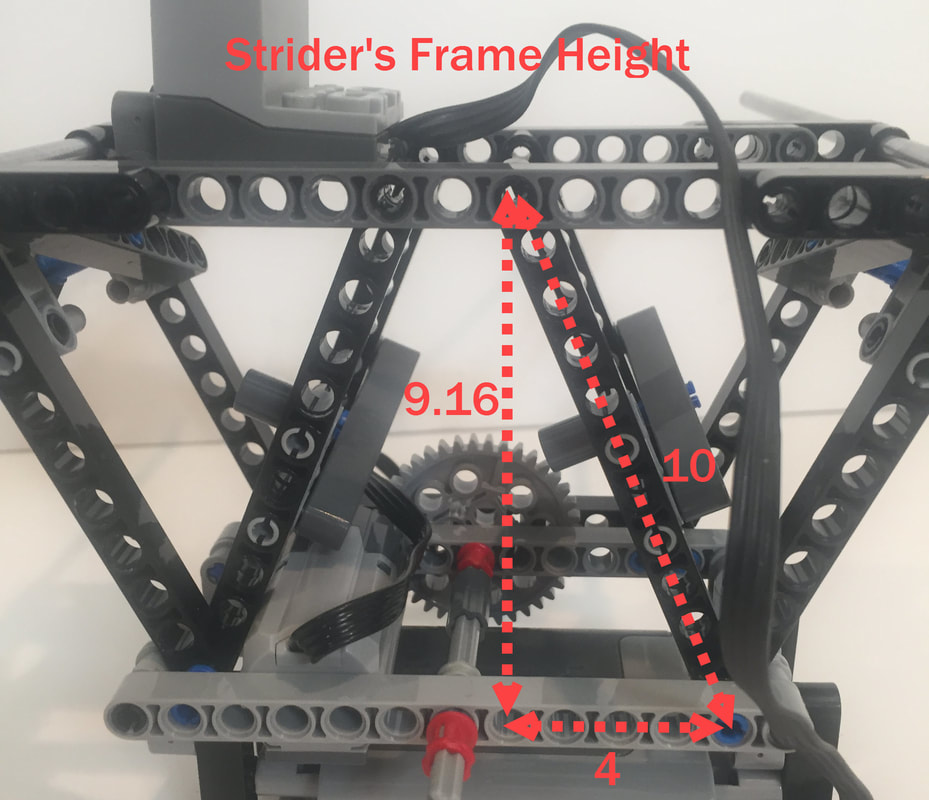
I rushed my Klann Ver 2 build and didn't build the outer frames in an optimal way: 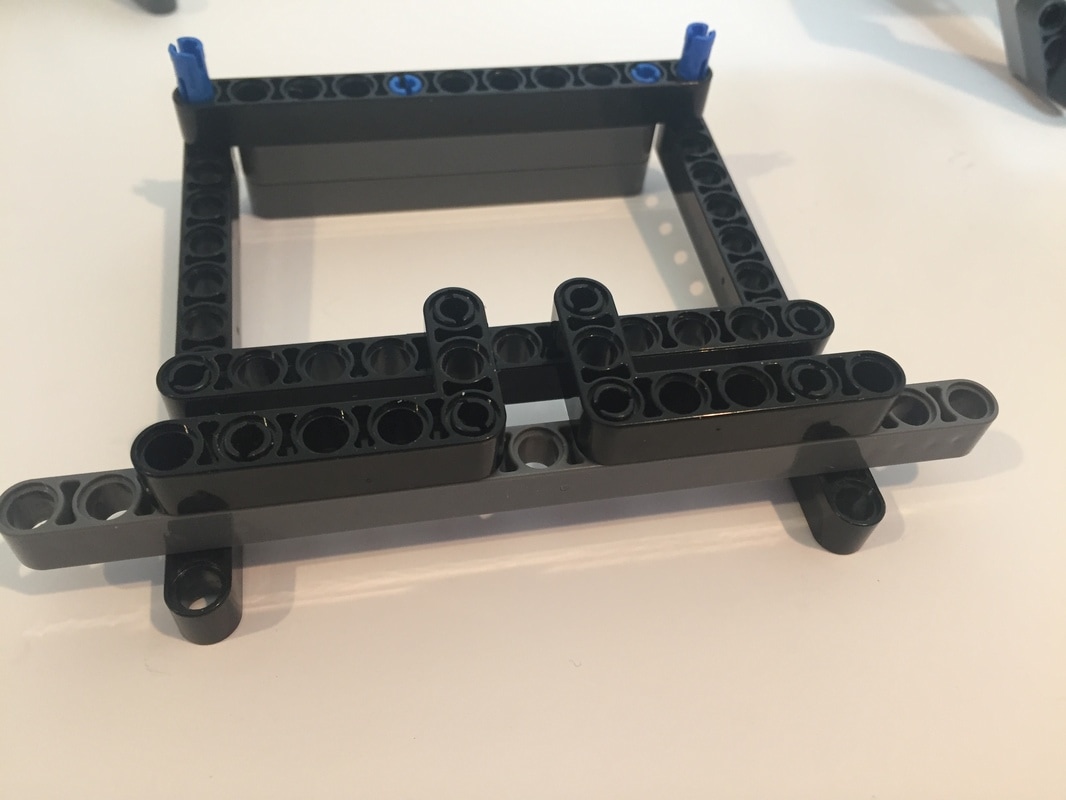 The only thing keeping this frame's corners at right angles are the two 3x5 L-shaped LEGO parts. If this frame were put under a lot of force, like would happen at a larger scale, the corners would be subjected to torque that could easily cause the rectangle to collapse. To avoid this diagonals need to be added, which will convert the rectangles into triangles and lock the corner's angles. The challenge with walkers in LEGO is we often need diagonals for rectangles that define the linkage's parameters. In other words, these diagonals often need to be the hypotenuses of right triangles. As you can see below, my Klann's upper support rods are 7 holes above the motor's axle, and the lower support rods are 2 holes below the motor's axle. Neither of these lengths work with a 3-4-5 or 6-8-10 right triangle with LEGO parts for hypotenuses. What can we do using the integer lengths of LEGO's beams?  NOTE: When determining the length of LEGO beams the first hole is always counted as 0! If you don't measure LEGO beam lengths in this way you won't be able to use the Pythagorean theorem to calculate which beams to use as hypotenuses. Fortunately, with LEGO we don't have to be at precise integer numbers, and we can use hypotenuses that are "close enough". 1. Hypotenuses for rectangles of height 7. Plugging in a 90 degree angle with a side length of 7, plus a few other whole number sides into the Pythagorean theorem yields this near integer number triangle: 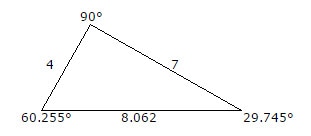 I used this triangle for Klann's inner frame where two 9 hole beams create hypotenuses of length 8: 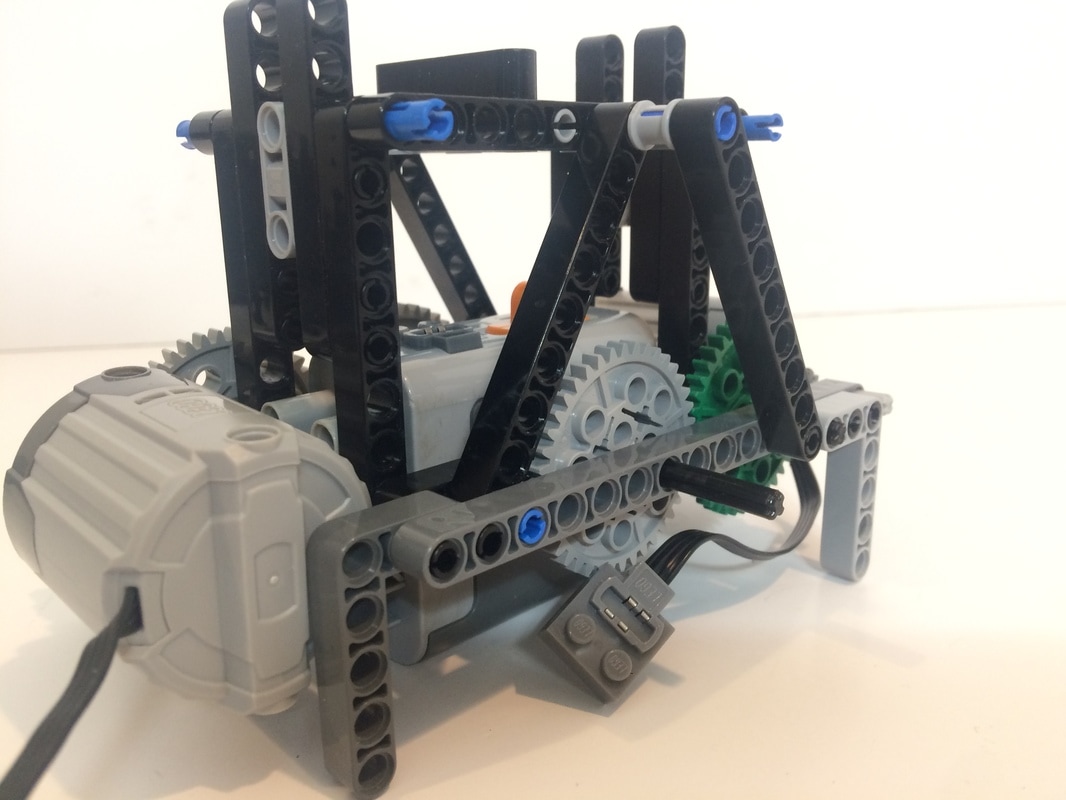 I also used this.triangle for TrotBot's frame:  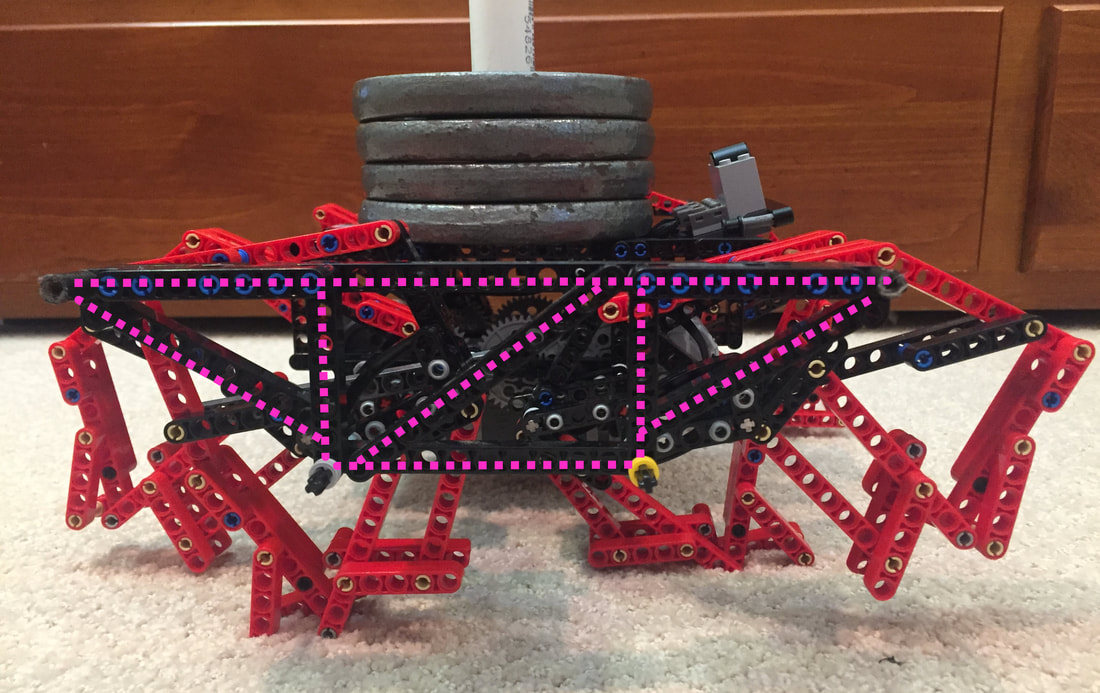 Triangles convert bending forces to tension and compression, which even plastic LEGO parts can handle well 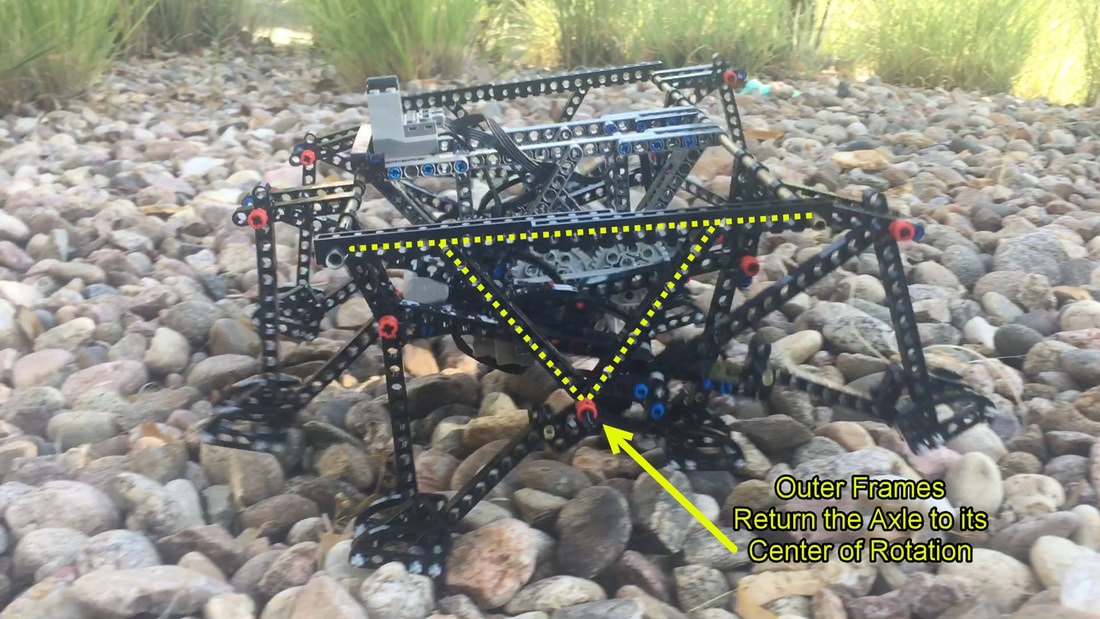 Strider's Outer Frame's Triangle 2. Hypotenuses for rectangles of height 9. We can also connect the top and bottom beams of Klann's frame with a hypotenuse: 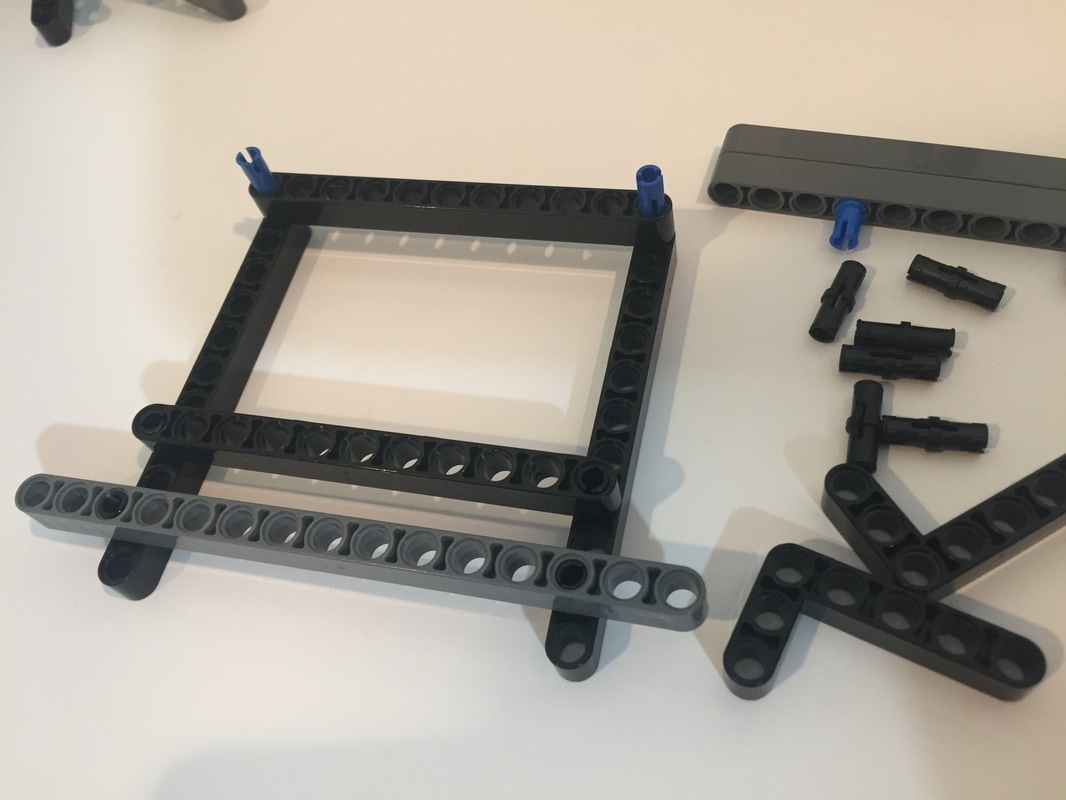 Plugging a 90 degree angle with a side length of 9, plus a few other whole number sides into the Pythagorean theorem yields another near integer number triangle: 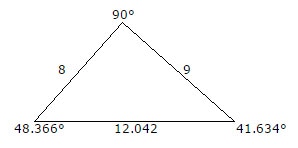 So, 13 hole LEGO beams can be used to lock Klann's outer frames into triangles, like this: 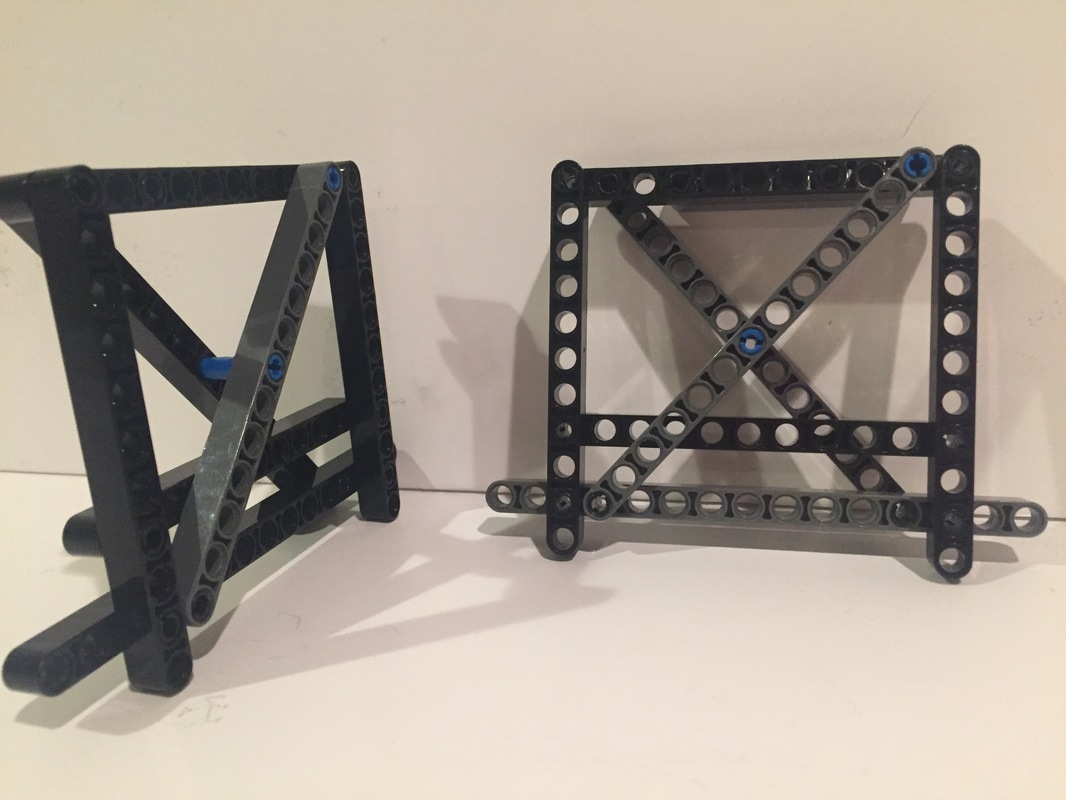 Here are a few other useful triangles for LEGO frames:
 Also, the below 5-3 bent beam can be used as a hypotenuse. 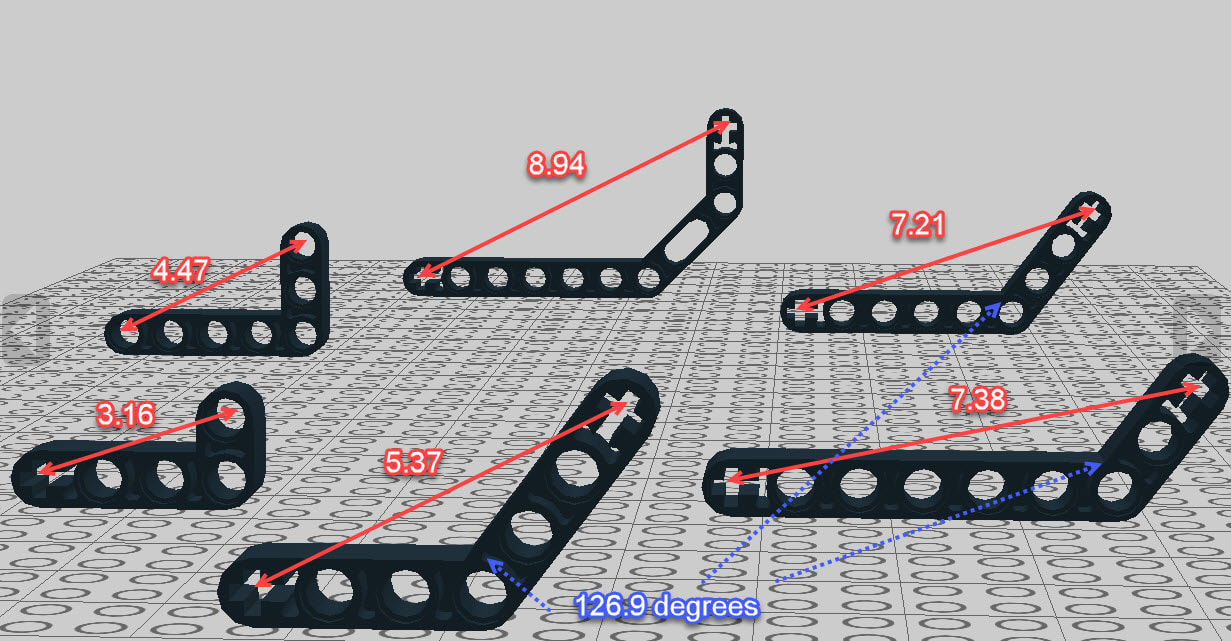
You can create more triangles by lengthening a side of the above parts by attaching a LEGO beam to it.
 LEGO beam lengths for creating frames of varying heights
Klann's Mechanical Spider was the first walker I ever built. I like it since it's robust and not too complicated (as mechanical walkers go).
Here's a simulation using the ver 2 LEGO beams as the bar lengths. The python script that made this sim can be downloaded here.
|
Categories
All
Archives
February 2023
|
 RSS Feed
RSS Feed