The first result of that effort was TrotBot's heel linkage. As you can see in the diagram below, TrotBot's heel strikes before the main foot, taking the weight while pushing backward to continue driving the robot forward. The resulting smoother gait reduces both torque and power requirements (for an analogy of why bumpy gaits require more power, think how much harder it is to do lunges than it is to simply walk).
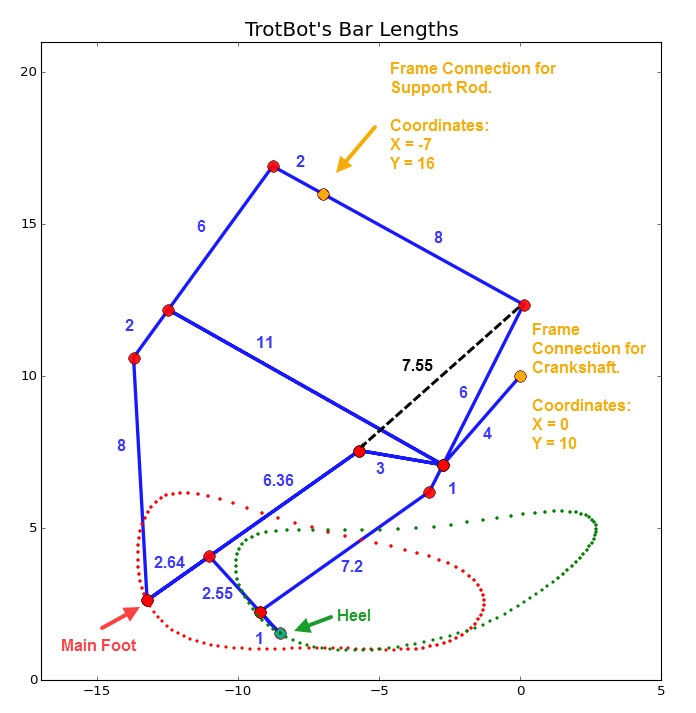
Another benefit of TrotBot's heel is it steps higher on the backside of the foot-path, allowing TrotBot's rear legs to step about as high as the front legs to avoid getting stuck astride obstacles, as can be seen in this heel-path simulation: 
Without its heel, TrotBot's rear legs probably would have gotten stuck on some of these 2x4s:
We've also played around with a few ideas for active toes that push down on the ground as the foot begins to lift: 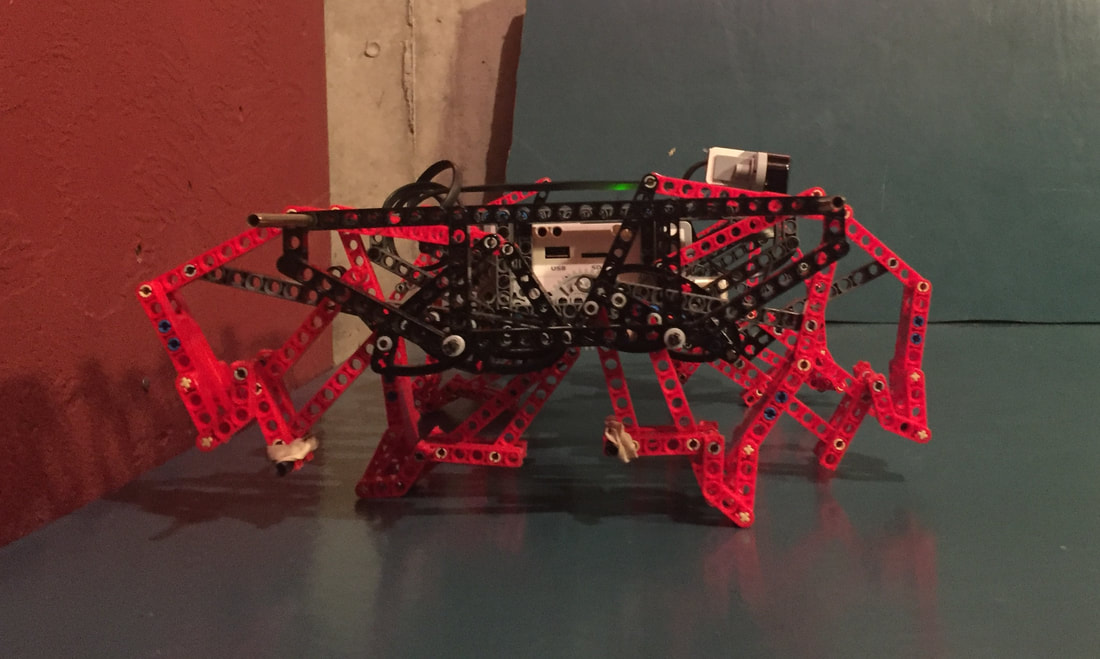
Mindstorms TrotBot with Active Toes
Using shaped feet to smooth gaits is explored next in Feet Part 2, and the impact of TrotBot's active toes are explored in Feet Part 3.
4 Comments
Do Hyun
11/25/2020 07:16:26 am
What is the length of the body in the second image(gif)?
Wade
11/25/2020 03:52:41 pm
Hi Do Hyun, in that simulation we simply used a frame long enough to prevent the rotating cranks from hitting the other crank - so just over 4 units for the bottom part of the frame (versus 10 units for our LEGO prototypes). Way back when we did experiment with various frame lengths, and found if they were too short then TrotBot tended to flip backward. We also found that frames that were significantly longer than our LEGO versions had worse performance. Our LEGO frame lengths seemed about right for overall performance.
Wade
12/17/2020 04:24:04 pm
Thanks! Leave a Reply. |
Categories
All
Archives
February 2023
|

 RSS Feed
RSS Feed